
http://en.wikipedia.org/wiki/Robotics
Related: Our final invention • immortal trendyNanotechnology Nanotechnology ("nanotech") is the manipulation of matter on an atomic, molecular, and supramolecular scale. The earliest, widespread description of nanotechnology[1][2] referred to the particular technological goal of precisely manipulating atoms and molecules for fabrication of macroscale products, also now referred to as molecular nanotechnology. A more generalized description of nanotechnology was subsequently established by the National Nanotechnology Initiative, which defines nanotechnology as the manipulation of matter with at least one dimension sized from 1 to 100 nanometers. This definition reflects the fact that quantum mechanical effects are important at this quantum-realm scale, and so the definition shifted from a particular technological goal to a research category inclusive of all types of research and technologies that deal with the special properties of matter that occur below the given size threshold.
insects drones A conceptual insect robot If you are talking about big boys’ toys, then surely being part of the military’s hush-hush research and development team would place you squarely in the front line of being able to play with such new technology. While UAVs (Unmanned Aerial Vehicles) have done their bit in wars across the world to be able to scout enemy territory without putting human lives at risk, they are large – and unwieldy at times. What happens when one wants to perform a delicate operation that has a far more covert objective? This is where miniature sized robots come in handy – and insect drones could be the answer to this question. The extremely tiny remote controlled vehicles that are based on insects will most likely have been deployed in sensitive areas to date, where these are called the micro air vehicles (MAVs), and will share similar physics as that employed by flying insects.
Hirose and Fukushima Laboratory Introduction We have been developing various kinds of robotic systems, such as snake-like arms and locomotors based on the biomechanical study of the real snake, quadruped walking robots, and crawler vehicles. We also have been studying basic disciplines, such as novel design principles for mechanical system, sensing devices, and control systems. We are determined to continue the research and contribute to the society by supplying practical robotic systems applicable for various fields, such as rescue operation, demining and assistance of elderly and physically challenged persons.
Welder A welder or welder operator is a tradesman who specializes in welding materials together. The term welder refers to the operator, the machine is referred to as the welding power supply. The materials to be joined can be metals (such as steel, aluminum, brass, stainless steel etc.) or varieties of plastic or polymer. Welders typically have to have good dexterity and attention to detail, as well as some technical knowledge about the materials being joined and best practices in the field.[1][2] Safety issues[edit] Welders are also often exposed to dangerous gases and particulate matter.
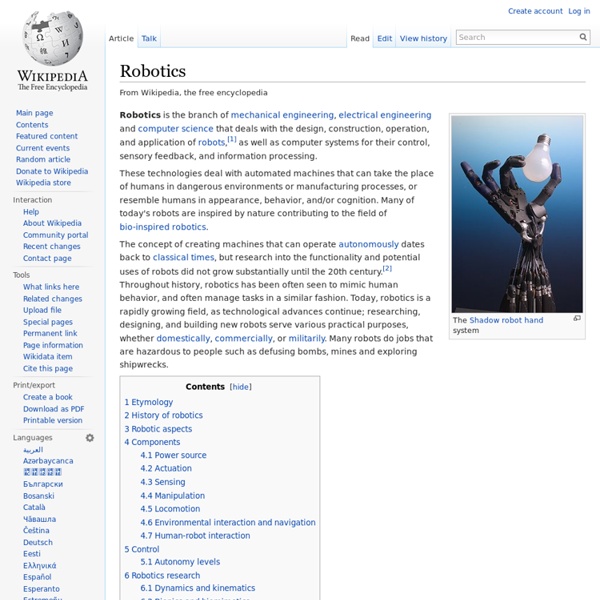
Biotechnology "Bioscience" redirects here. For the scientific journal, see BioScience. For life sciences generally, see life science. sphère toucher Science Published on June 20th, 2012 | by James Ayre With the right sensors, actuators and software, robots can now be given a tactile sense that imitates that of the sense of touch in humans. Lineman (occupation) A lineman (American English) or linesman (British English), also occasionally called a lineworker, powerline technician (PLT), or a powerline worker, is a tradesman who constructs and maintains electric power transmission and distribution facilities. The term is also used for those who install and maintain telephone, telegraph, cable TV and more recent fiber optic lines.It is also used to maintain most of the telephone poles in the world. The term refers to those who work in generally outdoor installation and maintenance jobs. Those who install and maintain electrical wiring inside buildings are electricians.
Life extension The sale of putative anti-aging products such as nutrition, physical fitness, skin care, hormone replacements, vitamins, supplements and herbs is a lucrative global industry, with the US market generating about $50 billion of revenue each year.[2] Some medical experts state that the use of such products has not been proven to affect the aging process, and many claims of anti-aging medicine advocates have been roundly criticized by medical experts, including the American Medical Association.[2][3][4][5][6] Public opinion[edit] Life extension is a controversial topic due to fear of overpopulation and possible effects on society.[10] Religious people are no more likely to oppose life extension than the unaffiliated,[11] though some variation exists between religious denominations. A Spring 2013 Pew Research poll in the United States found that 38% of Americans would want life extension treatments, and 56% would reject it. Average and maximum lifespans[edit] Diets and supplements[edit]
cognition artifice In the 1950s and '60s, artificial-intelligence researchers saw themselves as trying to uncover the rules of thought. But those rules turned out to be way more complicated than anyone had imagined. Since then, artificial-intelligence (AI) research has come to rely, instead, on probabilities -- statistical patterns that computers can learn from large sets of training data. The probabilistic approach has been responsible for most of the recent progress in artificial intelligence, such as voice recognition systems, or the system that recommends movies to Netflix subscribers.
Labor unions in the United States Most unions in the United States are aligned with one of two larger umbrella organizations: the AFL-CIO created in 1955, and the Change to Win Federation which split from the AFL-CIO in 2005. Both advocate policies and legislation on behalf of workers in the United States and Canada, and take an active role in politics. The AFL-CIO is especially concerned with global trade issues. In 2013 there were 14.5 million members in the U.S., compared with 17.7 million in 1983. In 2013, the percentage of workers belonging to a union in the United States (or total labor union "density") was 11.3%, compared to 20.1% in 1983.[1] From a global perspective, the density in 2010 was 11.4% in the U.S., 18.4% in Germany, 27.5% in Canada, and 70% in Finland.[2] Union membership in the private sector has fallen under 7%[3] — levels not seen since 1932.
Futures studies Moore's law is an example of futures studies; it is a statistical collection of past and present trends with the goal of accurately extrapolating future trends. Futures studies (also called futurology and futurism) is the study of postulating possible, probable, and preferable futures and the worldviews and myths that underlie them. There is a debate as to whether this discipline is an art or science.