
Глава 15 - 15.4. Пересечение луча и объекта. Поместив луч выбора и объекты в одну систему координат, мы готовы проверить какие объекты пересекает луч.

Поскольку объекты представлены сетками с треугольными ячейками, один из возможных способов заключается в следующем. Для каждого объекта мы перебираем элементы его списка граней и проверяем не пересекает ли луч какой-нибудь из этих треугольников. Если да, значит луч попал в тот объект, которому принадлежит треугольник. Однако, выполнение проверки пересечения с лучом для каждого треугольника сцены требует много времени на вычисления. Более быстрый, хотя и менее точный метод — представить каждый объект с помощью ограничивающей сферы. Луч выбора может пересекать несколько объектов. Зная центральную точку c и радиус r сферы, мы можем проверить находится ли точка p на поверхности сферы с помощью следующей простой формулы:
Moving average. In statistics, a moving average (rolling average or running average) is a calculation to analyze data points by creating a series of averages of different subsets of the full data set.
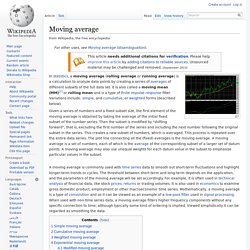
It is also called a moving mean (MM)[1] or rolling mean and is a type of finite impulse response filter. Variations include: simple, and cumulative, or weighted forms (described below). Given a series of numbers and a fixed subset size, the first element of the moving average is obtained by taking the average of the initial fixed subset of the number series. Then the subset is modified by "shifting forward"; that is, excluding the first number of the series and including the next number following the original subset in the series. Simple Kinect Joint Smoothing. I was recently working on a project that used the Microsoft Kinect SDK.

The goal here was to have a users hand drive a cursor on a large screen, and allow them to navigate around by using a hover-to-click model. One thing that became immediately apparent was that the data coming from the device was very, very jumpy. Smoothing Kinect Depth Frames in Real-Time. Introduction I've been working with the Microsoft Kinect for Xbox 360 on my PC for a few months now, and overall I find it fantastic!

However, one thing that has continued to bug me is the seemingly poor quality of rendered Depth Frame images. There is a lot of noise in a Depth Frame, with missing bits and a pretty serious flickering issue. The frame rate isn't bad from the Kinect, with a maximum of around 30 fps; however, due to the random noise present in the data, it draws your perception to the refresh. In this article, I am going to show you my solution to this problem. Background Some Information on the Kinect By now, I would assume that everyone has at least heard of the Kinect and understands the basic premise.
On the Kinect, there is an Infrared (IR) Projector, a Color (RGB) Camera, and an Infrared (IR) Sensor. Important Setup Information At the time of this posting, the commercial SDK has not been released. People.csail.mit.edu/sparis/publi/2009/fntcgv/Paris_09_Bilateral_filtering.pdf. Computer Vision. Fast Bilateral Filter: demo.m. Fast Bilateral Filter. Fast Bilateral Filter Sylvain Paris and Frédo Durand Computer Science and Artificial Intelligence Laboratory Massachusetts Institute of Technology The sources are in C++.

The provided makefile compiles everything. To reproduce the running times of our paper, you need to compile with optimization options turned on. Sample C#-Code: fast Gauss filter. The program executes two separate algorithms:1) A classical (simple) convolution with its own quadratic filter kernel with circularily symmetric values of a Gaussian bell-shaped curve.

The bell-shaped curve automatically adjusts (at any kernel size) its central value to 1.0 and its corner values to 0.01.2) A three time repetition of the fast averaging algorithm with 3 identical filter sizes . Until (Release Mode compilation) 1) is faster than 2) but with 2) is faster than 1). The algorithms accept any quadratic filter sizes where N must be a positive odd integer . The algorithms works with any image format that can be read and written with the methods of the Bitmap-class. Bilateral Filtering. [MatLab] [Matlab] Bilateral Filter. Gesture in Human-Computer Interaction. Welcome!
A note to visitors of this website: The international gesture workshops are interdisciplinary events for those researching gesture-based communication and wishing to meet and exchange ideas across disciplines. A focus of these events is a shared interest in using gesture and sign language in human-computer interaction. The 1996 gesture workshop in York, UK, organized by Philip Harling and Alistair Edwards is considered the starting event.
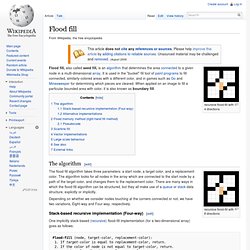
Henceforth international gesture workshops have been held roughly every second year, with fully reviewed post-proceedings typically published by Springer-Verlag until 2011. From 19 - 21 June, 2013 the Tilburg Centre for Cognition and Communication (TiCC) hosted a combined meeting of the 10th International Gesture Workshop (GW) and the 3rd Gesture and Speech in Interaction (GESPIN) conference at Tilburg, The Netherlands, with over 100 delegates from 15 countries participating. Ipke Wachsmuth, U Bielefeld ^ to top. Kinect Finger-tip detection. Feature_extractor.cc - kinect-apps-playground - A place to host experimental code related to Kinect hacking and related apps. Flood fill. Recursive flood-fill with 4 directions The algorithm[edit] recursive flood-fill with 8 directions Depending on whether we consider nodes touching at the corners connected or not, we have two variations, Eight-way and Four-way, respectively.
Matlab - C++ algorithm for flood filling a binary image. Eprints.soton.ac.uk/263996/1/fullreport.pdf. Flood-fill Flood-Fill Recursive Flood-Fill Flood-Fill from Seed 8.