
3d Tracking - Javier Barandiaran Martirena. Abstract Method for real-time 3D object tracking.
During the tracking process, the algorithm is continuously projecting the 3D model to the current frame by using the pose estimated in the previous frame. Create Your Own Haar Classifier for Detecting objects in OpenCV. The steps for training a haar classifier and detecting an object can be divided into : Creating the description file of positive samplesCreating the description file of negative samplesPacking the positive samples into a vec fileTraining the classifierConverting the trained cascade into a xml fileUsing the xml file to detect the object Let us see all these steps in detail.

First of all,we need a large number of images of our object. Stéréovision : obtenir une image 3D avec 2 webcam. Un programme révolutionnaire permet de transformer une webcam bon marché en scanner 3D. Algorithme reconstruction de forme 3D. Microsoft PowerPoint - Computer Vision using SimpleCV and the Raspberry Pi 2.pptx - Computer Vision using SimpleCV and the Raspberry Pi.pdf. Reconnaissance des objets polyédriques - Abderrezak Saidani. La reconstruction tridimensionnelle d'un ensemble de points informe sur la structure g'eom'etrique de ce même ensemble. 1.4.1 Les deffirentes approches de la reconstruction tridemensionnelle · Reconstruction projective Quand les points sont d'efinis dans un repère projectif.

Reconstruction 3D temps-réel des mains en mouvement. De Ensiwiki.
Introduction La reconstruction en 3 dimensions d'objets est de nos jours un domaine de recherche très étudié. Les applications pourraient être aussi bien dans le domaine de l'animation que pour d'autres milieux tels que l'immobilier, la présentation d'articles pour de la vente en ligne... C'est un sujet de recherche aussi complexe que récent. Certaines technologies peuvent servir à reconstruire un objet en 3 dimensions. Ces technologies étant très récentes, nous n'avions pas accès à toutes les informations nécessaires pour savoir laquelle des deux technologies allait nous donner les meilleurs résultats. Objectifs Ce projet pouvait être divisé en deux parties distinctes : Premièrement, l'étude des caractéristiques de la Kinect : trouver quels sont ses avantages, ses limites. How to Build a Robot Tutorials - Society of Robots.
Computer Vision vs Machine Vision Computer vision and machine vision differ in how images are created and processed.
Computer vision is done with everyday real world video and photography. Machine vision is done in oversimplified situations as to significantly increase reliability while decreasing cost of equipment and complexity of algorithms. As such, machine vision is used for robots in factories, while computer vision is more appropriate for robots that operate in human environments. Machine vision is more rudimentary yet more practical, while computer vision relates to AI.
OPENCV: STEREO CAMERA CALIBRATION. 3D reconstruction with opencv and point cloud library. 3D rendering in OpenCV. /trunk/opencv/samples/c/stereo_match.cpp – OpenCV. Fundamental Guide for Stereo Vision Cameras in Robotics - Tutorials and Resources - Into Robotics. Machine vision is based on information from digital images and depending on the application, the vision system can be designed for inspection, guidance, detecting, tracking, etc.
Human visual system is the most sophisticated and powerful vision solution to observe the environment and extract information. A similar system with the biological vision was built for robotic applications and is called stereo vision. A stereo vision system is designed to extract 3D information from digital images and use these for examining the position of objects in two images, to build an advanced object recognition system that recognizes objects in different arrangements (for example when objects are placed one in front of the other), tracking different objects, etc.
Fundamental Guide for Stereo Vision Cameras in Robotics - Tutorials and Resources - Into Robotics. Stereo vision with OpenCV. [openCV]: Reconstruction 3D. Efficient 2D to 3D video conversion implemented on DSP. The proposed framework consists of the following stages: 2D color video sequence decomposition, RGB component separation, DM computation using wavelets at multiple decomposition levels (M-W), in particular wavelet atomic functions (M-WAF), disparity map improvement via dynamic range compression, anaglyph synthesis employing the nearest neighbor interpolation (NNI), and 3D video sequence reconstruction and visualization.

Below, we explain in detail the principal 3D reconstruction stages (Figure 1). 2.1. Disparity map computation Stereo correspondence estimation based on the M-W (M-WAF) technique is proposed to obtain the disparity map. The stereo correspondence procedure consists of two stages: the WAF implementation and the WTM computation.
Here, we present a novel type of wavelets known as WAFs, first introducing basic atomic functions (up, fupn, πn) used as the mother functions in wavelet construction. Anandabhishek_cs6780.pdf. Matlab - Creating 3D volume from 2D slice set of grayscale images. Triangulation. In trigonometry and geometry, triangulation is the process of determining the location of a point by measuring angles to it from known points at either end of a fixed baseline, rather than measuring distances to the point directly (trilateration).
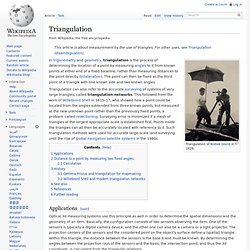
The point can then be fixed as the third point of a triangle with one known side and two known angles. Applications[edit] Optical 3d measuring systems use this principle as well in order to determine the spatial dimensions and the geometry of an item. Basically, the configuration consists of two sensors observing the item. One of the sensors is typically a digital camera device, and the other one can also be a camera or a light projector. Distance to a point by measuring two fixed angles[edit] Triangulation may be used to calculate the coordinates and distance from the shore to the ship. The following formulae apply in flat or Euclidean geometry. Calculation[edit] Insight3d - opensource image based 3d modeling software.