
Darwin installation. From WikIRI Software is divided in two different layers: the driver of the robot, depending on Robotis software and IRI_lab utilities, and the ROS layer.
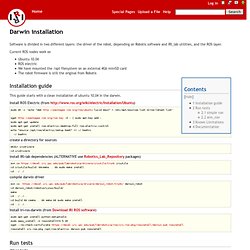
Current ROS nodes work on Ubuntu 10.04 ROS electric We have mounted the /opt filesystem on an external 4Gb miniSD card The robot firmware is still the original from Robotis Installation guide. How to work with ROS in new hardware platform? ROSCon 2012 - The Gazebo Simulator as a Development Tool in ROS. iStruct - Projects- Robotics Innovation Center - DFKI GmbH. The aim of the project iStruct is to develop a robotic system as well as biologically inspired structural components which, if applied on the robotic system, effectively improve the locomotion and mobility characteristics.
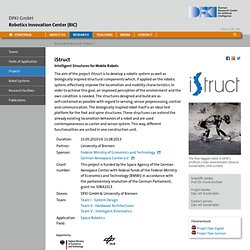
In order to achieve this goal, an improved perception of the environment and the own condition is needed. The structures designed and build are as self-contained as possible with regard to sensing, sensor preprocessing, control and communication. iStruct - Walking. 05A_02_kuehn. Stewart Platform reinvents the wheel so you don’t have to.