
Dynamic Walking 2013 : Day 2 : Andy Schwartz + Gregg, Song, Weber, Majidi - YouTube - Nightly. WebbotLib - Nightly. C Library for Atmel AVR Processors WebbotLib is a C library for robot builders supporting the following microcontrollers: ATMega168, ATMega32, ATMega328P, ATMega640, ATMega644, ATMega1280, ATMega2560 and ATMega2561.

The library supports a wide variety of different motor controllers, sensors and other devices. This allows you to concentrate on writing your own software without having to worry about the low level routines required to communicate with the attached devices. When ever possible we have standardised the devices. For example: all distance sensors will return a value in centimeters. As well as the supported microcontrollers listed above the library also provides support for some commercial boards based on these devices. The source code and documentation for the latest release of this library is available from: Note that there are two code streams:-
Labyrinth of Software Freedom. Chapter 2: Social Dynamics of Free Software Licenses in the the Context of the Program Life Cycle - Nightly. Labyrinth of Software Freedom Dr.
Nikolai Bezroukov Draft (version 0.97) Prev | Contents | Next Copyright 2000-2011, Nikolai Bezroukov. This is a copyrighted unpublished work. Contents. Robot MarketPlace - Speed Controllers - Nightly. Robot Power - Where To Buy - Nightly. Willow Garage - Nightly. 5) Links to other self balancing projects - OneWheeled - Nightly. Interesting and inspirational projects: Self-balancing vehicles and models you can potentially buy (not sure if some of them infringe Segway patents though): e-nuvo power wheel, a self balancing 2 wheeled robot platform: Click here Beauto Balancer small model robot balances on 2 wheels: Click here The ewee from Germany: A mini Segway for about 1/4 of the price.
Click here. MarilynMonrobot - Nightly. Robotic Related Sites - Nightly. MarilynMonrobot - Nightly. TOP 4 Humanoid Robots - PETMAN (Boston Dynamics), ASIMO アシモ(Honda), HRP-4 (Kawada), NAO (Aist) Robot - YouTube - Nightly. Motion Control IC: High-Performance Motion Control Processors, Motor Speed Control - Nightly. Willow Garage - Nightly. DIY Muscle Sensor / EMG Circuit for a Microcontroller - Nightly. Measuring muscle activation via electric potential, referred to as electromyography (EMG) , has traditionally been used for medical research and diagnosis of neuromuscular disorders.
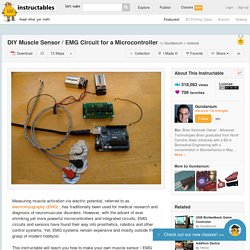
However, with the advent of ever shrinking yet more powerful microcontrollers and integrated circuits, EMG circuits and sensors have found their way into prosthetics, robotics and other control systems. Yet, EMG systems remain expensive and mostly outside the grasp of modern hobbyist. This instructable will teach you how to make your own muscle sensor / EMG circuit to incorporate into your next project. Use it to control video games, robot arms, exoskeletons, etc. Click on the video below for a demonstrations on how to hook up and use your EMG circuit board!
You can now also purchase EMG sensors, kits, cables and electrodes at www.AdvancerTechnologies.com! Robotics in Education, University Research, Autism - Nightly. Optical Encoder, High Resolution w/Mounting Hardware - Nightly. High Resolution Kit Encoder - Nightly. The Avago HEDR-5xxx Series encoders are high performance replacements for our existing low cost HEDS-5xxx series three channel optical encoders.
These upgraded encoders now come with higher resolution of 1200cpr to 3600cpr and are designed for easy assembly. The base-plate and outer diameter of these encoders are also compatible with the legacy HEDS-5xxx series making them ideal replacements for users who wish to upgrade due to higher CPR requirements. Each encoder contains a codewheel, LED source, detector and integrated circuitry. As the codewheel rotates the detector IC generates two square waves in quadrature and an index pulse (high state) of 90°e (gated to signal A and B low), once per each full rotation of the codewheel. BitVoicer - Speech Recognition for Microcontrollers - BitSophia - Nightly. BitVoicer - Features BitVoicer is the speech recognition software that brings to the microcontrollers’ universe all the processing and voice analyzing power of the PC.

The BitVoicer’s speech recognition technology and the use of communication standards common in the industry (Serial/UART or TCP/IP) make it extremely easy and fast to design complex speech recognition functionalities for virtually any microcontroller available in the market. These are the main features of Bitvoicer: NEW! 18 additional languages!!! Documentation - ROS Wiki - Nightly. XBee Handheld Controller by Quantum Robotics — Kickstarter - Nightly. Kickstarter Collections Projects We Love Kickstarter Gold Trending Nearly Funded Just Launched Everything Categories.
Rutscherle - selbstbalancierender Elektroroller - RN-Wissen - Nightly. TKJElectronics/Balanduino - Nightly. Robot Wiki. XRobots - Android 12 Part 7, Initial Dynamic Stability Testing for my bipedal humanoid android - YouTube - Nightly. Robot Power OSMC Project Info - Nightly. The purpose of the OSMC project, started in 1998, was and is to provide high-quality H-bridge speed control units to hobbiests and professionals at price/performance levels unmatched by expensive commercial units.

After several years of developement the OSMC project has born fruit and produced a rugged high-power speed control system specifically designed for the needs of robot combat and other high-power low-weight applications. The original goal of the project was to create a 48V, 100A capable controller for use in robot combat events. A prototype board was designed and built but interest waned and few of the orignal boards were used in combat. The project lapsed for several years until late in 2001 when it was revived by Dennis Millard and Chris Baron, the two principals of Robot Power, on the Yahoo!
Message board system. The OSMC is an "Open Source" philosophy project similar to that used in Open Source software projects such as the Linux operating system or the Apache Web server. Contact us (North America) ● Touch Bionics. The world’s leading prosthetic hand ● Touch Bionics. The i-limb ultra prosthetic hand is designed for those who want more from their prosthesis.

With the i-limb ultra, your prosthesis looks and moves more like a natural hand than any other powered prosthetic hand. Each finger bends at the natural joints so that it can accurately adapt to fit around the shape of the object you want to grasp. Powered by Touch Bionics' unique biosim software, the i-limb ultra is the most versatile prosthetic hand available, providing you with the ability to customize the hand for your daily needs. Choose from a wide selection of automated grips and gestures to help you complete your daily tasks, such as index point for typing, precision pinch mode for gripping small objects or natural hand position for walking or while at rest. The bionic hand with the human touch. The i-Limb is the first prosthetic hand that has five individually-powered articulating digitsWearers control hand via an electrical sensor that detects muscle movements in residual limbMost of the 4,000+ i-Limbs in operation have been fitted to veterans from wars in Iraq and Afghanistan London (CNN) -- What do will.i.am and Iron Man have in common?

They're both rather partial to bionic limbs. In his latest music video, "Scream & Shout," a human hand can be glimpsed clasping what appears to be a sophisticated robot hand stolen from the set of a high-budget sci-fi film. What many of the video's 97 million (and counting) viewers may not realize, however, is that the appendage in question is a genuine prosthetic hand that, its makers claim, has taken us one step closer to truly simulating the real thing. "We've broken through the barrier of making a hand that looks like a medical deviceDavid Gow, inventor of i-limb. Ex-cop builds robot to 'snatch kids back from abyss' Former Baltimore cop, Mark Haygood and his robot HEX, which he made by recycling electrical equipment. HEX is four foot, three inches tall and weighs 50 pounds. Haygood fell in love with robots at a young age. "I grew up very poor in Baltimore and every Christmas my mother used to purchase toy robots for me -- the kind that shuffled across the floor, spun around with lights flashing.
I thought they were the most marvelous things on the planet," he says. His feet are made from cooking trays and his legs were built using hi-fi speakers. Haygood dismantled fans and power tools to create HEX's arms. An old clock radio has been hacked to create his head. The camera situated inside HEX's head will be wired up in the next phase of the project, Haygood says.
Rapyuta, a Collective Brain for Robots in the Cloud. Old school robots don’t particularly like unstructured environments such as the homes of us messy humans. Objects are moved, task descriptions change and there is just no way to structure responsibilities into repetitive automated processes. Which is why they’ve mostly kept to ordered, predictable places like factories. But a new generation of robots ventures into the disorderly world of humans. In order to cope, a stand-alone robot needs a wide array of sensors to map out its changing surroundings and a lot of computing power to process the sensor data. But a heavy workload means a lot of power consumption, chaining the bots to wall sockets or restricting their operational time due to battery limitations. To overcome these restrictions European scientists built Rapyuta, a framework that harnesses the power of the Internet to enable individual robots to offload their computations to the collective.
The RoboEarth database makes it possible to build economically efficient robots.