
LMR sur Twitter : "#TITAN: a super sized #robot platform #DiY #robots... TITAN. TITAN is a super sized Wild Thumper designed for jobs such as lawn mower, snow plow or fire fighting robot.

I blogged the initial construction of this prototype here: As you can see in this photo below, the TITAN uses the same free floating (super twist) front and rear suspension used by the Wild Thumper and a standard independant suspension for the center wheels. This allows all 6 wheels to remain on the ground even when any one wheel is raise above 150mm (6 inches) as shown in the photo below. The wheel is actually 170mm above the floor and all 6 wheels have full traction. The ground clearance is more than 150mm (more than 6 inches) but this depends on the size of the wheels used. Two 12mm steel rods run the length of the chassis underneath. The chassis has two battery compartments, each capable of holding 3x 12V, 12AH SLA batteries. Skill Builder: Hydraulics for Robots. Hydraulic Robots The giant fighting robots from SyFy’s Robot Combat League used hydraulics.

Why would you want to use hydraulics on your robot? It was good enough for the car-sized fighting robots Mark Setrakian designed for Robot Combat League, the show he helped develop for the SyFy network. I’m not suggesting you build a giant robot (although that’d be pretty cool), but there is plenty you can learn, and knowledge is power. Underwater Robots Think For Themselves. The ocean depths are a notoriously treacherous environment for human beings.
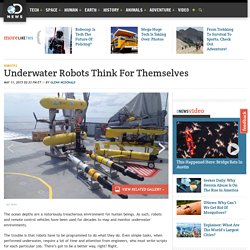
As such, robots and remote control vehicles have been used for decades to map and monitor underwater environments. The trouble is that robots have to be programmed to do what they do. Even simple tasks, when performed underwater, require a lot of time and attention from engineers, who must write scripts for each particular job. There’s got to be a better way, right? Right. Battling Robots Shoot IR Lasers At MakerCon. One of the most attention grabbing displays at this year’s MakerCon is the demolished set of Seattle, on which radio controlled cars battle.

These bots pack an Intel Edison inside and an IR blaster and camera on their roof. You can drive them around, literally steering in any direction thanks to their omniwheel design, and battle against each other for the top score. A camera mounted to the blaster not only allows you to check out a first person view, but could theoretically allow you to pilot your bot remotely! DIY High Speed Splash Photography. Hunger Games for Robots. LMR sur Twitter : "Cheap #bluetooth module for an #Arduino #DiY #Robots #electronics... Cheap bluetooth module for an Arduino. Some time ago I ordered a cheap bluetooth module on ebay for my Arduino.

I went for a no-name module, when I say cheap I mean it. (well after all it were only a few dollars cheaper than the branded ones) Anyway, module arrived and I tried to communicate with an internal command processor, which I expected to be there. Hooked up serial lines to the TX(1) and RX(2) pins on the module, 3.3V VCC(12) and GND(13). Nothing happened, no response to AT commands. On the other hand, I could see the module on the bluetooth "ether", both on my primary linux box and on an old XP box, so some sort of life were detected. Well, after some time I gave up, and cried my failed attempts on the shoutbox. LMR sur Twitter : "How to use infrared receiver #sensors for #collision avoidance #Robots #DiY...
How to use infrared receiver sensors for collision avoidance. Do you want to know how to use cheap infrared receiver sensors to detect objects?

How to build a Single or Dual proximity sensor and determine fast if you have objects or a clear path ahead or on the sides? Then read on, my friends, read on! When I started to build hobby robots, I wanted to start from the basics and go up to the fancy stuff. I never got good enough at the fancy stuff (I lack advanced programming skills), but I learned the basics (took me some years to do it, as there was not too much info on how to do it with AVR micros). There are good books to learn robotics, but almost all of them are for PIC microcontrollers. Nowadays almost nobody is using one of the cheapest methods to detect objects, avoid obstacles or find the range to the detected objects. Bio-Inspired Gel Could Create "Graceful" Robots That Move Like Humans. LMR sur Twitter : "Solve Photo-interrupter problems (from printers and scanners) to run #Robots. Photo-interrupter problems. I salvaged some photo-interrupters from some printers and scanners.

Thinking they would make good sensors, I decided to use them as encoders on my robot (which I haven't posted yet). However, I ran into several problems along the way. Since I learned a few things by overcoming these problems, I thought I would share. Problem 1: How do you hook these things up? A photo-interrupter is a black u-shaped part. Finding the exact values needed to make the photo-interrupter work is a bit tricky. Tiny Robot Pulls Objects 2,000 Times Its Size. A tiny robot that weighs no more than a bouncy ball can pull objects nearly 2,000 times its size — the equivalent of a human pulling a blue whale, according to researchers at Stanford University.

This robot, called a MicroTug, can also hoist an object 100 times its weight vertically up a glass surface, which researchers say is the equivalent of a human climbing up a skyscraper while carrying an elephant. DNews: Rescue Robots Battle It Out At DARPA Challenge At Stanford University’s Biomimetics and Dextrous Manipulation Lab, a team of researchers looked to nature when designing the miniature robots and emulated the uniquely grippy feet of ants and geckos that help them climb surfaces.
As a result, the MicroTug uses strong directional adhesives to tightly grip a surface. The robot, equipped with a large winch, tow cable and hook, then uses its onboard motors to pull the objects. In the video below, the 12g MicroTug pulls off some pretty impressive feats, like pulling a 600g coffee mug. LMR sur Twitter : "Clever #electronics: Tri-state one wire motor control for your #Robots #DiY... Tri-state one wire motor control. There may be times when you have a limited number of I/O pins and you want to drive a small DC motor.
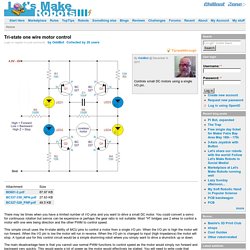
You could convert a servo for continuous rotation but servos can be expensive or perhaps the gear ratio is not suitable. Most "H" bridges use 2 wires to control a motor with one wire being direction and the other PWM to control speed. This simple circuit uses the tri-state ability of MCU pins to control a motor from a single I/O pin.
When the I/O pin is high the motor will run forward. When the I/O pin is low the motor will run in reverse. The main disadvantage here is that you cannot use normal PWM functions to control speed as the motor would simply run forward and backward very quickly. In this schematic I have not used flyback diodes because the combination of PN transistor junctions and the LEDs will perform that function. Windows 10 Will Be the Software Brains Behind DIY Arduino Projects. Massive Microsoft Machinations For Makers. If you’re not stuck in the tech news filter bubble, you may not have heard the Microsoft Build Developers Conference is going on right now.

Among the topics covered in the keynotes are a new Office API and a goal to have Windows 10 running on a Billion devices in a few years. There are, however, some interesting things coming out of the Build conference. Windows 10 is designed for hackers, with everything from virtual Arduino shields running on phones, Windows 10 running on Raspberry Pis, and Visual Code Studio running on OS X and Linux. This is not the first time in recent memory Microsoft has courted the maker market. Microsoft begrudgingly supported the hardware dev scene with the PC version of the Microsoft Kinect, and a year or two ago, Microsoft rolled out drivers for 3D printers that were much more capable than the usual serial interface (read: the ability for printer manufacturers to add DRM).
As always, you may express your infinite derision in the comments below. LMR sur Twitter : "Start-Up Solves ‘#StarWars’ #Droid Puzzle #Robots... Start-Up Solves ‘Star Wars’ Droid Puzzle. LMR sur Twitter : "If you want a robust robot: Beware of #Delays #Robots #Tricks #Programming... Beware of Delays. Whenever you use delays in your robot code your microcontroller is going to do nothing but wait until the delay is passed. Where on one hand this is a blessing it is on the other hand a curse. It is a blessing when you need to slow things down... but from my point of view this is mostly not nessesary.
It is a curse when your system needs to be reactive but can't since there are several delays. Reactiveness can make the difference between your robot falls down a stair or stops, crashes into a wall or avoids it, tracks an object or looses it, detects an important signal or misses it. How To Install Windows 10 IoT On Your Raspberry Pi 2. Thanks to the release of Windows 10 for multiple single-board computers, tinkerers are now waking up to the possibility of running Windows as a usable and surprisingly polished alternative open source operating systems like Raspbian. But how do you run Windows on a RaspPi? And why? First, I invite you to check out Microsoft’s refreshingly complete GitHub page where they offer instructions for installing Windows 10 onto Raspberry Pi, Arduino, Galileo, and MinnowBoard.
The page offers instructions for getting the official “Windows Embedded IoT” image for use with these devices. LMR sur Twitter : "Outboard #Accelerometer as Bump #Sensor and now #position! #Arduino #Robots... Outboard Accelerometer as Bump Sensor and now position tracker! (Yes, OddBot has improved it again!) Note: it's getting harder and harder for me to take much credit for this-OddBot has done all the work since I first posted it and he's taken it from a built-in feature of a product that his company sells to being a highly-functional DIY open-source project. He deserves full credit (and big props) for this. It's hard to beat the Dagu MicroMagician for an Arduino Bot Brain with all its built-in goodness. OddBot and Chris The Carpenter have made the code available/linked to it from their websites on GoogleCode. However if you're like me and you have half a dozen various 'dweenies scattered around the lab but no MM yet, you can still take advantage of some of the Brilliant work that OddBot did in making the accelerometer into a bump sensor by using an outboard accelerometer.
To experiment with these ideas, set up the circuit as shown in the main image: Download the attached .zip file, expand it and import the sketch to your Arduino IDE, then load the sketch into your board. Francisco Dominguez sur Twitter : "Just after meeting with @JelbyUK and its #Hatalogico cc @LetsMakeRobots #RaspberryPi #IoT #Robots. Francisco Dominguez sur Twitter : "I met @JelbyUK and its #Hatalogico cc @LetsMakeRobots #RaspberryPi #Robots.
The WiPy: The Internet of Things Taken to the Next Level. Call for reviewers. LMR sur Twitter : "#RaspberriPi emulation for #Windows to test #Robots #Python in #Hatalogico. LMR sur Twitter : "Reviewers: get a (#free) #PWMs+Analog for #RaspberryPi #Hatalogico #Robots... Call for reviewers: get a (free) PWMs+Analogue "hat" for your Raspberry Pi for a review! UPDATE 1/May/2015 I fell all you saw also the big interest this hat (shield) has for our robotic projects, so... Thanks all for your interest on reviewing and please, if you didn't ask for a piece yet, you still can get one for a very good price at Kickstarter so go now before boards are gone! There were also some interesting questions about PWM connection and comparing this Hatalógico hat with other similar ones. John(Author) is developing an interesting FAQ about it that will be at the end of this post: don't miss it!
------ End of updates ------ Let's face it: Raspberry Pi is a powerful yet cheap platform for programming, but it by itself, has not the right input/output capabilities for robotics. Starting from just PWM as some people already found difficult; it has only 1 hardware PWM output! What about analogue input and output? John Lumley sur Twitter : "Reviewers wanted! Like #robots and #blogging ? Please check out this link: #RaspberryPi. Call for reviewers: get a (free) PWMs+Analogue "hat" for your Raspberry Pi for a review! LMR sur Twitter : "#LiPo #batteries - the worlds smallest fact box... to power your #robots. Li-Po batteries - the worlds smallest fact box. First tip about Li-Po batteries: Make sure you are not searching images on lipo. The net is full of tips and clever in-depth articles on Li-Po batteries, and in future LMR we will have a wiki, and that will definately have a section on the subject. BUT.. Just because TinHead said that I promised to write a tip on this (and more - which will come .. later) - here is a few things I'd wish someone had told me, so I'd not be that scared and confused.
I am sure I'll get a digit or two wrong here, please hit me, so I can fix, tanks ;) Scarce Skills, Not Scarce Jobs. At a large distribution center located north of Boston, a robot lifts a shelf holding merchandise and navigates it through the warehouse to the workstation of an employee who then picks the item needed for an order and places it in a shipping box. Incoming orders are processed by a computer that sends picking requests to sixty-nine robots. Then, the robots deliver storage units to roughly a hundred workers, saving the workers the task of walking through the warehouse to find the items. In other distribution centers, this is work that warehouse workers do.
The distribution center, run by Quiet Logistics—a company that fills orders for sellers of premium-branded apparel, is featured in the 60 Minutes episode “Are Robots Hurting Job Growth?” In the segment, Steve Kroft poses the following question to Bruce Welty, the CEO of Quiet Logistics: "If you had to replace the robots with people, how many people would you have to hire? " LMR sur Twitter : "Costly #robots have issues too: #Spacecraft Out of Control in Orbit #Space... Russian Spacecraft Spinning Out of Control in Orbit, with Salvage Bid Underway. Update for April 29: Russia's space agency has confirmed that Progress 59 is falling from space and will burn up in Earth's atmosphere.
Read the full story: Doomed Russian Space Station Cargo Ship Will Fall Back to Earth Soon The Russian space agency Roscosmos is scrambling to regain control of a robotic Progress 59 cargo ship that appears to have suffered a serious malfunction shortly after launching into orbit early today (April 28). Video from the Progress 59 spacecraft showed it in a dizzying spin, with the Earth and sun rapidly coming into and then out of frame. LMR sur Twitter : "Massive! "Arduino 20 #Servos, 4 Pins, Variable Refresh Rate" #Robots #DiY... Arduino 20 Servos, 4 Pins, Variable Refresh Rate. LMR sur Twitter : "¿3v Motors on a 9v #Battery? Let's see: for #Robots or #Eletronic #DiY... 3v Motors on a 9v Battery. It's kind of taken for granted often that a 9v battery (thanks mixmar ;-) won't provide the current to drive a 3v hobby motor, especially when you run a microcontroller off of it too.
Ignoblegnome and I were trying to drive that point home today in this post. However, CrazyCreator was insistant that the motor ran off of his battery. LMR sur Twitter : "How can you #measure #distance with light? #Robots #Electronics #DiY... How can you measure distance with light? Note: Apologies to OddBot. Vadym Melnyk sur Twitter : "Computers That Know How You Feel Will Soon Be Everywhere #BigData #MachineLearning #AI. Computers That Know How You Feel Will Soon Be Everywhere. Sometime next summer, you’ll be able to watch a horror series that is exactly as scary as you want it to be—no more, no less. You’ll pull up the show, which relies on software from the artificial intelligence startup Affectiva, and tap a button to opt in. Then, while you stare at your iPad, its camera will stare at you. The software will read your emotional reactions to the show in real time. LMR sur Twitter : "Faster #Servos, Smoother Projects for #robots or more.
Faster Servos, Smoother Projects. A post to introduce a new library RCArduinoFastLib. The library supports upto 20 servos on an Arduino in two banks of 10. The two banks can have an independent refresh rate allowing you to run ESCs at high frequency on one bank and Servos at 50Hz on the other - or everything at the same frequency, whatever you choose. The library includes two main optimisations over the standard servo library- LMR sur Twitter : "Connect #Arduino to #LCD #display with only 2 pins! #DiY #Robots... Connect Arduino to LCD with only 2 pins. Shelf-Picking Robots Will Vie for a Prize from Amazon. LMR sur Twitter : "Control more #servos with a few outputs for cheap #robots #DiY... How many servos you need to control? Those who intend to build a more complex project (in this case I mean with more DOFs, like a hexapod, biped humanoid and others) may find dificulties if using a Arduino UNO or similar board, unless they have a Mega.
That's what happened with me when I was working on my biped project. After researching a lot of alternatives, without changing the board, I found this IC: TLC5940. This is sold as a 16 channel LED driver, but with this library it can control 16 servo motors easily as the "sweep servo". But not only that, the IC can be daisy-chained and expand the PWM outputs even more (I haven't yet tried it, but seems to be very easy). What you lose of your board are 5 pins. LMR sur Twitter : "Servo Math: #control your #servos with #precision #Arduino #robots... Servo Math. I have always seen things differently with my electronics and programming background.
Servo Math came from me seeing servos as having three parts. The angles 0-1000, 90-1500 and 180-2000 microseconds(us). 0 is the Low Range(1000) for Servo Math. LMR sur Twitter : "Bluetooth 4.0 to communicate your #mobile with your #Arduino #robots. Bluetooth 4.0 for Arduino. UPDATE: 7/6/14 -- Silkscreen corrections.UPDATE: 6/1/14 BOM CorrectionsUPDATE: 4/2/14 -- Corrected information and linked the new breakout board, v.9.9 Also, this fellow is working on open-source firmware for the HM-10. Using motor encoders to control speed.
This tutorial shows how to connect 2 DC motors with simple encoders to an Arduino for precise speed control and distance measuring. The sample code is written for a DAGU "Mini Driver" and "Simple Motor and Encoders Kit" but will work with any Arduino board with any gearbox / encoder combo. When you build a robot using wheels or tracks then you quickly discover that it is impossible to make the robot travel in a straight line. Service Droid motor control with encoders. LMR sur Twitter : "Your #robots faster: Finite State Machines, Flow Charts, and State Tables. Finite State Machines, Flow Charts, and State Tables. Connect an Arduino to your iPhone. Digital and analog servo's. Music and sound fx with minimal program memory usage. LMR sur Twitter : "Very low cost 2A dual #DC #MotorDriver with cool features for #robots by Juchen #electronics...
Earth Day: Terraforming The Earth. LMR sur Twitter : "How to configure #servos for #Robots to prevent damage? Here an easy way with #Arduino. Configuring servos to prevent damage. Crazy Bob robot made by Žygimantas Pusvaškis Lithuania. Crazy Bob robot made by Žygimantas Pusvaškis Lithuania. Markus Kasanmascheff sur Twitter : "From Metropolis To Ex Machina: Why Are So Many Robots Female? ?utm_source=dlvr. Let's share our robots with the world! Follow Let's Make Robots in Social Media! Let's Make Robots! Rick Winscot sur Twitter : "Remote control for #robots - come learn how at the @LetsMakeRobots booth at @makerfaire this weekend! GRAB-E. Blind Lemon. Penny. Venux. Why Tri.