
Larger Arduino robot platform. Android bluetooth robot app camera stream. How to make your first robot. If you have purchased an "Instant Robot" shield, you can find a project using that shield here.

If you prefer the instructions in a single PDF, Dominic / Servello has made this nice PDF to download - Thanks :) Welcome :) Everything here is so easy, that after you have gone through it, you can make a robot in a couple of hours. Why can't you do that now? Because there are so many little things you need to know. There are other "How to get started building robots" out there. All images in high-res here. Materials needed It used to be a hassle to buy the materials, because not one single webshop was carrying everything needed, and you had to buy from several shops. Good news is that Solarbotics now have made a kit for these instructions: Solarbotics shop (Webshop, located in Canada) - And if you buy it there, you even support hosting of letsmakerobots.com - because in order to be on the list above, the shops contacted us, and we made a deal :D (The following is all included in the bundle) Yes.
Main:
How to make a Robo-Bellhop. This Instructable shows how to use the iRobot Create to make a moving bellhop.

This was lifted entirely with permission from carolDancer's instructions, and I put it up as a sample entry for our contest. Robo-BellHop can be your own personal assistant to carry your bags, groceries, laundry, etc., so you don't have to. The basic Create has a bin attached to the top and uses two on-board IR detectors to follow its owner's IR transmitter. With very basic C software code, the user can secure heavy groceries, a large load of laundry, or your overnight bag onto Robo-BellHop and have the robot follow you down the street, through the mall, down the hall or through the airport -- wherever the user needs to go.
Norris Labs.
Obstacle Avoidance. Operating System. RaspiDuinoRover - (Yet another) iPhone driven moving Raspberry Pi and Arduino rover. RaspiDuinoRover is a project about making a rover with a Raspberry Pi (and its camera module) and an Arduino Uno, and controlling it with an iPhone.
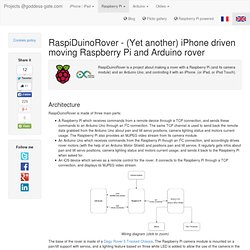
(or iPad, or iPod Touch). Architecture RaspiDuinoRover is made of three main parts: A Raspberry Pi which receives commands from a remote device through a TCP connection, and sends these commands to an Arduino Uno through an I2C connection. The same TCP channel is used to send back the remote data grabbed from the Arduino Uno about pan and tilt servo positions, camera lighting status and motors current usage. Building an Arduino Robot, Part I: Hardware Components. I have been doing software for almost as long as I have memory.
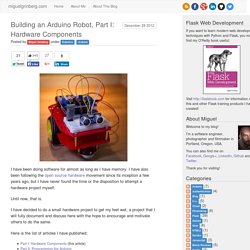
I have also been following the open source hardware movement since its inception a few years ago, but I have never found the time or the disposition to attempt a hardware project myself. Until now, that is.
How to Make a Arduino+Raspberry Pi Robot Platform. 4.

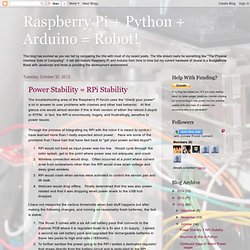
Setup PuTTY on your Desktop Computer. Follow this video. This will allow you to begin SSHing into the Pi. That way you don't have to look at a little RCA screen like me. For those who aren't familiar with SSH (like I was before this video), the video will explain it. You have to plug in your Pi's network number. Slam mapping. Raspberry Pi + Python + Arduino = Robot!: October 2012. This is the second part of a topic introduced a while ago here but not finished until now.
Note that Part 3 of this series of posts, including an updated library, is now available here. One of the files packaged with the Python to Arduino Interface download is a short sample illustrating basic functionality. Here is that sample with some additional commentary and a screen shot of it in operation: Import the library import time from Py2Ard import interfaceClass The only argument the class needs is the port on which to find the Arduino # Specify the port as an argument my_board = interfaceClass('/dev/ttyUSB0') The two options below are useful for debugging. Print "---------------------------" my_board.setTraceOn() print "---------------------------" my_board.setDebugOn() print "---------------------------"
Raspberry Pi and Arduino. Pi Robot. In the previous article on obstacle avoidance (see Obstacle Avoidance in the Real World), our robot used simple sonar and infrared sensors to detect the presence of obstacles, then adjusted its heading accordingly.

As we saw, it takes quite a few such sensors to handle all the possible obstacle configurations the robot might encounter. And the reaction of the robot to the presence of an obstacle is always fairly simple: just turn left, right or back up. We will now try a different approach using our omnidirectional vision system. The most obvious advantage of 360-degree vision is that you can see your entire surroundings in a single snapshot. We can think of each pixel in the image as a potential obstacle detector analogous to our sonar and infrared sensors but now we have thousands of them instead of just five or six. The image below is a typical view through the omnidirectional vision setup. One method that works well is based on edge detection. Now here comes the key step.
Kylie's Pinky PiBot!