
Mlj-2013.pdf. Clarifai: Amplifying Intelligence. Home · davidrmiller/neural2d Wiki. Neural-net-tutorial. Neural Net in C++ Tutorial on Vimeo. Deep Learning Lecture 4: Regularization, model complexity and data complexity (part 1) Physics Video Archive COLLOQ_MOSER-MOSER_042715. Yes: Automata can think. This region of the map deals with general mathematical properties of machines, rather than with the specific architectural properties dealt with on the other maps.
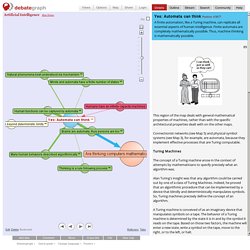
Connectionist networks (see Map 5) and physical symbol systems (see Map 3), for example, are automata, because they implement effective processes that are Turing computable. Turing Machines The concept of a Turing machine arose in the context of attempts by mathematicians to specify precisely what an algorithm was. Alan Turing's insight was that any algorithm could be carried out by one of a class of Turing Machines. Indeed, he proved that an algorithmic procedure that can be implemented by a device that blindly and deterministically manipulates symbols.
A Turing machine is conceived of as an imaginary device that manipulates symbols on a tape. The table of rules (or "machine table") correlating these reactions with states and symbols exhaustively specifies a given machine. Artificial Intelligence. TECHNOLOGY. Bioengineers Build Circuit Board Modeled On The Human Brain.
Stanford scientists have generated a hardware system based on the human brain that is capable of simulating, in real-time, a million neurons with billions of synaptic connections using only a similar amount of power to what is required to run a tablet computer.

The results have been published in Proceedings of the IEEE. Generating models that can simulate brain activity is tricky business. Personal computer simulations of the cortex of a mouse are approximately 9,000 times slower than the real thing and consume around 40,000 times more power. The Human Brain Project desires to simulate a human-scale cortex, but as it stands it’s predicted to require around as much power as 250,000 households! In this study scientists generated system that they are calling Neurogrid, which is comprised of 16 “Neurocore” chips integrated together on a circuit board. Unfortunately a drawback at the moment is the high costs involved in development; each Neurogrid costs around $40,000. Neural Network. Stanford's Artificial Neural Network Is The Biggest Ever.
Evolved Virtual Creatures. This video shows results from a research project involving simulated Darwinian evolutions of virtual block creatures.

A population of several hundred creatures is created within a supercomputer, and each creature is tested for their ability to perform a given task, such the ability to swim in a simulated water environment. Those that are most successful survive, and their virtual genes containing coded instructions for their growth, are copied, combined, and mutated to make offspring for a new population. The new creatures are again tested, and some may be improvements on their parents. As this cycle of variation and selection continues, creatures with more and more successful behaviors can emerge.
The creatures shown are results from many independent simulations in which they were selected for swimming, walking, jumping, following, and competing for control of a green cube. Download movie from the Internet Archive For further technical information, see: Back to other work by Karl Sims. Www.karlsims.com/papers/alife94.pdf. Welcome to the International Society for Artificial Life. Statistical Mech. - Game of Life.
Microrobotics Laboratory. Research overview* Remarked one unimpressed Yale researcher: "Leave it to the Harvard fellows to invent new and exciting ways to be irritating.

" * for more details on these topics, please see our publications and our YouTube channel Flapping-wing microrobots As the characteristic size of a flying robot decreases, the challenges for successful flight revert to basic questions of fabrication, actuation, fluid mechanics, stabilization, and power - whereas such questions have in general been answered for larger aircraft. When developing a flying robot on the scale of a common housefly, all hardware must be developed from scratch as there is nothing "off-the-shelf" which can be used for mechanisms, sensors, or computation that would satisfy the extreme mass and power limitations. Ambulatory microrobots We have demonstrated the ability to prototype multi-legged ambulatory robots on the scale of, and inspired by, both insects and myriapods.
Dragonfly.