
Udev - Kernel recognizes USB device but then I can't find it in /sys or /dev.
Sunspot. Ding Laboratory: I2C on an AVR using bit banging. I2CeDEMOAppNote.pdf. Main / Sunspot. SunSPOT is a hard- and software platform developed by Oracle Labs ( Project SunSPOT was created to encourage the development of new applications and devices.
It is designed from the ground up to allow programmers who never before worked with embedded devices to think beyond the keyboard, mouse and screen and write programs that interact with each other, the environment and their users in completely new ways. A Java programmer can use standard Java development tools such as NetBeans to write code. Sunspot has three layers: Battery Processor Board with Radio Sensor Board Attach:sunspotleyers.jpg The SPOTManager tool provides the following functionalities: allows you to query and change the configuration of individual SunSPOT allows you to download and install versions of the SunSPOT SDK launches Solarium, a tool for managing individual SunSPOTS and simulating virtual SunSPOTS SunSPOTs are usually used in the following topology: Attach:sunspottopology.jpg Deploy Hello World Demo Switches LEDs.
How do servos work? The purpose of this information is to give an overview of how servos operate and how to communicate with them.

Though we have taken steps to assure the quality of information here, ServoCity makes no guarantees about the information presented. ServoCity cannot be held liable or accountable for any use or misuse of the provided information. If you have questions about this information please e-mail tech@servocity.com Servos are controlled by sending them a pulse of variable width. The control wire is used to send this pulse. Servo control. Servo and receiver connections Small radio control servos are connected through a standard three-wire connection: two wires for a DC power supply and one for control, carrying the pulses.
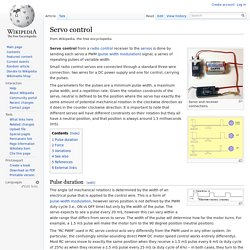
The parameters for the pulses are a minimum pulse width, a maximum pulse width, and a repetition rate. Given the rotation constraints of the servo, neutral is defined to be the position where the servo has exactly the same amount of potential mechanical rotation in the clockwise direction as it does in the counter clockwise direction. It is important to note that different servos will have different constraints on their rotation but they all have a neutral position, and that position is always around 1.5 milliseconds (mS). Pulse duration[edit] The angle (of mechanical rotation) is determined by the width of an electrical pulse that is applied to the control wire. The "RC PWM" used in RC servo control acts very differently from the PWM used in any other system. Force[edit] Variations[edit] See also[edit] How to attach Servo Motors to a Sun SPOT to create a remote-controlled pan-and-tilt Web Camera (On the SPOT: David G. Simmons) While pan-and-tilt camera mounts are plentiful and cheap these days, the ability to quickly and easily create your own pan-and-tilt camera mount based on Sun SPOTs is still an interesting and worthwhile project to pursue as an introductory exercise in how to develop full-featured Sun SPOT applications.

As part of this development exercise, I have also developed some extensions to the BaseStation itself which I use to dynamically add, and update, BaseStation applications, but those additions will be detailed in a separate post rather than being included here. Connecting Sensors and Actuators, Development and Debugging on the Sun SPOT Platform Part of the design goals of the entire Sun SPOT Project was to make connecting and controlling external devices – both sensors and actuators – as easy and as straightforward a process as possible. Fantastic Kobe: Servo Car [ Sun SPOT app ] (6) Let's write a very simple Sun SPOT program for the servos here.
![Fantastic Kobe: Servo Car [ Sun SPOT app ] (6)](http://cdn.pearltrees.com/s/pic/th/fantastic-kobe-servo-car-spot-96023215)
We can begin it with the "SunSpotApplicationTemplate" project in ${SUNSPOT_DIRECTORY}/Demos directory (${SUNSPOT_DIRECTORY} is usually "C:\Program Files\Sun\SunSPOT" on Windows, but if you are true to my previous blog entry, it may be "C:\Sun\SunSPOT"). If you haven't had the Demos yet, you could also download it from the web site as we did before (see installing Sun SPOT SDK). Here is a quick summary to install Demos: Main / Sunspot. SunSPOT and Servo Binding (MiKo's Blog) Month ago I started to write article about binding Servo to the SunSPOT eDemo board.
But I forgot to post it. I want to remedy this. Connecting any servo is really easy. You only need to address right pins on the demo board and after do that you can use writtend class Servo. Class Servo is placed in the packagecom.sun.spot.sensorboard.peripheral you have to also address right PIN by who you will control your servo. Import com.sun.spot.sensorboard.EDemoBoard;example: serv = new Servo(EDemoBoard.getInstance().getOutputPins()[EDemoBoard.H2]);Now you can use Servo methods getValue, setValue, setPosition ... to controll your servo. this is the program but what about real binding ?
Isn't it easy ? After all this you can see something like on the movie below.