
Dzhon Ahum
Unity3d + Arduino (Read serial in Unity3d) So, I've been bored, and trying to learn the limits of Unity3d free edition.

I also work with arduino (obviously), and came up with the idea that many people have. Why can't use use an accelerometer and use it to view the 3d world that way? Well, I did some research on the matter, and it seemed that everyone decided that you had to have a plugin in order to send and receive information. I've found that is not true... to a point. Une idée du futur. Un projet visionnaire. Trossen Robotics Blog. Ubuntu. Un article de Wikipédia, l'encyclopédie libre.

Ubuntu (prononciation [u.bun.tu], « ou-boun-tou » en français) est un système d’exploitation libre[6] commandité par la société Canonical et une marque déposée par cette même société. TurtleBot2 de Willow Garage et ClearPathRobotics. Simulation. Traduction. Shtooka. Un article de Wikipédia, l'encyclopédie libre.
Shtooka est un projet lancé par Nicolas Vion visant à fournir sous licence libre des collections d'enregistrements sonores de mots, expressions, proverbes prononcés par des locuteurs dans leur langue maternelle. Ces collections sont utiles dans l'apprentissage des langues, la recherche linguistique, etc. Le projet Shtooka existe depuis 2006[1] est s'est constitué en association loi de 1901 en 2009. Enregistrements[modifier | modifier le code] Plus de 100 000 enregistrements[2] sont disponibles aux formats Ogg, MP3 et embarquent des métadonnées sur le fichier audio.
Des informations sur ce qui est prononcé (le texte prononcé, la langue de prononciation du mot, ...)des informations sur le locuteur (nom, sexe, année de naissance, le pays et la région d'origine du locuteur (permettant par exemple de discerner les accents).des informations sur la prononciation du motdes informations sur la collection audiodes informations techniques. Synthèse vocale.
Un article de Wikipédia, l'encyclopédie libre.
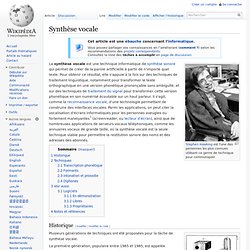
Stephen Hawking est l'une des personnes les plus connues utilisant ce genre de technique pour communiquer La synthèse vocale est une technique informatique de synthèse sonore qui permet de créer de la parole artificielle à partir de n'importe quel texte. Start [OpenQbo Wiki] Projets / RepRap. The bazaar. ROBOTS & transhumanisme. Futurism. Home. Arduino - HomePage. Robot domestique et robot programmable: acheter robot en quelques clics. Thecorpora S.L. Mendel - RepRapPro. Hardware. Arduino hexapod robot, first test. Fr. RepRap est la première machine autoréplicable de production d'usage général fabriqué par l'homme.

RepRap se présente sous la forme d'une imprimante 3D, pilotée par un logiciel libre, capable d'imprimer des objets en plastique. Puisque la RepRap est composée de plusieurs pièces de plastique et que la RepRap a la capacité d'imprimer ces pièces, la RepRap peut être considérée comme autoréplicable — tout le monde peut la construire avec du temps et le matériel nécessaire. Cela signifie également que — si vous possédez une RepRap — vous pouvez imprimer beaucoup d'objets utiles, voire même imprimer une autre RepRap pour un ami...
Le concept RepRap relève de la production de machines autoreplicables, ainsi que de les rendre librement accessibles au bénéfice de tous. Documentation. Constructivisme (épistémologie) Un article de Wikipédia, l'encyclopédie libre.
DigitalSpirit. Par hugo le mardi, septembre 29 2015, 15:21 - Format de la carte Comme je l'évoquais dans un article précédent, Seeedstudio qui produit les pcb, m'a demandé un surplus de 17$ à cause des demi-trous en bordure de la carte, vu le cout total de production des PCB (9$ pour 10), ça fait une belle surprise et de toute façon, je n'étais pas convaincu de l'utilité / praticité de ces demi-trous, j'ai donc résolu le problème en augmentant quelque peu la largeur de la carte qui passe de 16mm à 19mm, rien de bien méchant et surtout un gain appréciable en terme de place disponible sur le PCB.

CubicWeb Semantic Web Framework. Boarduino - Breadboard-compatible Arduino Clone. 3ders.org - 3D printer and 3D printing news, trends and resources. Reeti, un robot expressif. Finance participative. Un article de Wikipédia, l'encyclopédie libre.

La finance participative (en anglais crowdfunding) est une expression décrivant tous les outils et méthodes de transactions financières qui fait appel à un grand nombre de personnes pour financer un projet. Ce mode de financement se fait sans l'aide des acteurs traditionnels du financement, il est dit désintermédié. L'émergence des plateformes de finance participative a été permise grâce à internet et les réseaux sociaux. How to make a DARwIn-OP robot clone on a DIY 3D printer. Feb.9, 2013 How cool is it to make a robot of your own!

Mike, a computer programmer by day and an amateur roboticist by night, created a DARwIn-OP clone using DIY 3d printers. Intelligence artificielle. Un article de Wikipédia, l'encyclopédie libre.
Définition[modifier | modifier le code] Le terme « intelligence artificielle », créé par John McCarthy, est souvent abrégé par le sigle « I.A. » (ou « A.I. » en anglais, pour Artificial Intelligence). Il est défini par l’un de ses créateurs, Marvin Lee Minsky, comme « la construction de programmes informatiques qui s’adonnent à des tâches qui sont, pour l’instant, accomplies de façon plus satisfaisante par des êtres humains car elles demandent des processus mentaux de haut niveau tels que : l’apprentissage perceptuel, l’organisation de la mémoire et le raisonnement critique »[1],[2].
On y trouve donc le côté « artificiel » atteint par l'usage des ordinateurs ou de processus électroniques élaborés et le côté « intelligence » associé à son but d'imiter le comportement. Même si elles respectent globalement la définition de Minsky, il existe un certain nombre de définitions différentes de l'IA qui varient sur deux points fondamentaux[3] : Le Site des Robots, de la Robotique, des Exosquelettes et de leur actualité ...
Kit Prusa Mendel. HOVIS Eco Demonstration. [PoBot] [Script] reconnaissance vocale avec google (Page 1) / Trucs, astuces et scripts utiles. Google2ubuntu Voilà pas mal de temps que le projet avait été lancé (2012) mais je n'avais pas les compétences et le temps pour amener le projet là où je le désirais. J'ai donc repris tout le projet à 0 afin de fournir un système beaucoup plus souple et rapide de prise en main. Principe. Mixshop 3D Printer, RepRap Prusa Mendel Parts. COLLABORATIVE PROJECT FOR DESIGNING A PROFESSIONAL AUTONOMOUS MOBILE ROBOT - Call for participation.
Organisation du travail collectif - Un ou plusieurs objectifs sont définis pour chaque personne (membre) dans sa branche. - Chaque membre de ce projet travaille chez lui, à son rythme, avec son propre robot-prototype et une grande liberté pour atteindre son objectif. - La collaboration entre les membres est régie par une charte. Cadre et statuts Une association est créée afin de donner un cadre juridique minimum au projet MOSAIC.
Les membres ont le statut de bénévoles de l’association. Il est important de noter que cette association ne sert que de support au projet et n’aura ni salariés, ni structure organisée. Le rôle de cette association est aussi le support pour la collecte de fonds (subventions) pour le financement futur d’une société de fabrication et de commercialisation des robots. Génération Robots - Mindstorm lego NXT, robotic kits, nxt g, acheter robot autonome programmable. R2 Builders Club Official Website. ArduinoXbeeShield. Morse - Openrobots. /!\ technologie SCIENTISTE, au dépend de l'Humain. Home - Maker's Tool Works. Le robot Q.bo, basé sur ROS est idéal pour l'intelligence artificielle. A free audio database of words and expressions pronounced by native speakers.
[Project] A-pod, an ant inspired hexapod - Trossen Robotics Community. Hi all roboteers! Lately I've been working with a new hexapod. This is my third hexapod project. And this time I wanted to make something very different. I've always been inspired by insects and especially ants, check out Alexander Wild Photography of ants and you'll see what I mean.I've not tried to copy any ant, I think that would be almost impossible with the large legs compared to the body. I also wanted to use 645 servos for the coxa, femur and tibia. The last pictures demonstrates how flexible the head are going to be. Comment fabriquer un robot controlé par un iPhone d'Apple ?
Dans la gamme Mindstorms NTX de Lego (vous savez, les célèbres briques qui ont récemment fêté leurs cinquante ans ?) , se trouve un “robot” équipé d’un . Des petits malins ont réussi à changer ce robot en station d’accueil pour iPhone, avec la possibilité de . Délirant ? Documentation. Cymatics. 24.07.2010Cymatics On appelle "cymatics" les formes que les ondes sonores créent dans la matière, des formes complexes qui changent selon la fréquence du son. Sur cette image, on peut voir les formes produites dans l'eau par les fréquences allant de 12 à 30 Hz (espacées de 2 Hz).
Comme on peut le voir aussi dans les vidéos du précédent article sur ce sujet, la vibration crée la forme, et c'est sans doute là l'un des grands secrets de l'univers et des formes de la nature. Voici un diaporama de quelques images de cymatics dans l'eau... voir le diaporama Formes produites par les vibrations sonores de la musique des Pink Floyd... Cybernétique. Un article de Wikipédia, l'encyclopédie libre. La cybernétique (en anglais cybernetics) est un terme, formé à partir du grec κῠβερνήτης (kubernêtês) « pilote, gouverneur », proposé en 1947 par le mathématicien américain Norbert Wiener pour promouvoir une vision unifiée des domaines naissants de l'automatique, de l'électronique et de la théorie mathématique de l'information, en tant que « théorie entière de la commande et de la communication, aussi bien chez l'animal que dans la machine »[1].
Des scientifiques d'horizons très divers et parmi les plus brillants de l'époque participèrent, autour des « conférences Macy » organisées de 1946 à 1953, à ce projet interdisciplinaire : mathématiciens, logiciens, ingénieurs, physiologistes, anthropologues, psychologues… Les contours parfois flous de cet ensemble de recherches s'articulent toutefois autour du concept clé de rétroaction (en anglais feedback) ou mécanisme téléologique. MIA hexapod arduino III. Micromagic Systems Robotics Lab. Portal:Robotics. Français. Myrobotlab - Open Source Java Framework for Robotics and Creative Machine Control. A service based multi-threaded Java framework for robotics and creative machine control I for one, welcome our new robot overlords. Price compare 3D printers. Microsoft Robotics Studio and Lego Mindstorms NXT - Coding4Fun - Site Home - MSDN Blogs. The Lego Mindstorms NXT kit is an amazing upgrade to the original Lego Mindstorms product.
While the building blocks are not the traditional plastic stud blocks everyone is used to, the new construction parts allow for some very complex designs. Plateforme Robotique Eddie Parallax - Robot avec Kinect. Imprimante 3D reprap Prusa : Workshop montage. Un Workshop « montage imprimante 3D Reprap Prusa » est en cours au lab. Une première session a eu lieu Dimanche 8 Juillet de 14h00 à 19h00 chez Kawenga. Une petite vidéo de 10 minutes a été tournée en slow time lapse.
Le cadre a été monté et partiellement réglé ainsi que l’extrudeur. Les douilles à billes ont également été montées sur les pièces plastiques. Dans le même temps nous avons procédé aux changement du lit chauffant de la Shapercube pour un système réglable en hauteur pour que celui-ci soit bien parallèle aux axes X/Y, et muni d’une vitre sr sa partie supérieure pour la planéité.
Recueil de phrases d'exemples. Interactive RepRap Family Tree. Mécatronique. Un article de Wikipédia, l'encyclopédie libre. Les tutorials de robotique, tout pour construire un robot - www.robot-maker.com. How to make your first robot. If you have purchased an "Instant Robot" shield, you can find a project using that shield here. If you prefer the instructions in a single PDF, Dominic / Servello has made this nice PDF to download - Thanks :) iCub. Linux. Opencog. Open Dynamics Engine. Trossen Robotics - World's leading robot shop for robot kits and robot parts! Trossen Robotics Community - Powered by vBulletin. Sciences cognitives. Robots aspirateurs. ROS - Robot Operating System. Prusa-makergear. RoboEarth. Robot Operating System.
Options. Robot Automation Using ROS - Droid Wiki. Robot. RobotEarth : Un réseau de base de données commun pour tous les robots.