
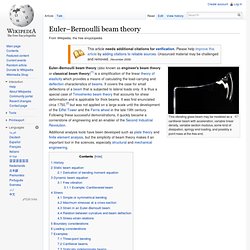
Euler–Bernoulli beam equation. This vibrating glass beam may be modeled as a cantilever beam with acceleration, variable linear density, variable section modulus, some kind of dissipation, springy end loading, and possibly a point mass at the free end.
Additional analysis tools have been developed such as plate theory and finite element analysis, but the simplicity of beam theory makes it an important tool in the sciences, especially structural and mechanical engineering. History[edit] Schematic of cross-section of a bent beam showing the neutral axis. Prevailing consensus is that Galileo Galilei made the first attempts at developing a theory of beams, but recent studies argue that Leonardo da Vinci was the first to make the crucial observations. Da Vinci lacked Hooke's law and calculus to complete the theory, whereas Galileo was held back by an incorrect assumption he made.[3] The Bernoulli beam is named after Jacob Bernoulli, who made the significant discoveries. Static beam equation[edit] The curve , or other variables. Bending. Bending of an I-beam In Applied mechanics, bending (also known as flexure) characterizes the behavior of a slender structural element subjected to an external load applied perpendicularly to a longitudinal axis of the element.

In the absence of a qualifier, the term bending is ambiguous because bending can occur locally in all objects. Torsion (mechanics) Torsion of a square section bar In solid mechanics, torsion is the twisting of an object due to an applied torque.
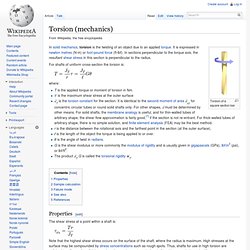
It is expressed in newton metres (N·m) or foot-pound force (ft·lbf). In sections perpendicular to the torque axis, the resultant shear stress in this section is perpendicular to the radius. Moment of inertia. A tightrope walker uses the moment of inertia of the long rod to help maintain balance.
This is Samuel Dixon crossing the Niagara river in 1890. Moment of inertia is the mass property of a rigid body that defines the torque needed for a desired angular acceleration about an axis of rotation. Polar moment of inertia. Second moment of area. Area Moment of Inertia and Polar Moment of Inertia – Application in Deflection and Bending of Beam and Torsion of Shaft. Written by: Suvo • edited by: Lamar Stonecypher • updated: 9/30/2010.

Difference between mass moment of inertia, polar moment of inertia, moment of inertia,& area moment of inertia. *The second moment of area =area moment of inertia =second moment of inertia *Moment of inertia =mass moment of inertia =the angular mass.

*Moment of inertia, also called mass moment of inertia or the angular mass, (SI units kg m2, Imperial Unit slug ft2) is a measure of an object's resistance to changes in its rotation rate. It is the rotational analog of mass. That is, it is the inertia of a rigid rotating body with respect to its rotation. The moment of inertia plays much the same role in rotational dynamics as mass does in basic dynamics, determining the relationship between angular momentum and angular velocity, torque and angular acceleration, and several other quantities.
Strain Energy. Strain Energy The external work done on an elastic member in causing it to distort from its unstressed state is transformed into strain energy which is a form of potential energy.

The strain energy in the form of elastic deformation is mostly recoverable in the form of mechanical work. Nomenclature c = distance from neutral axis to outer fibre(m) E = Young's Modulus (N/m2) F = Axial Force (N) G = Modulus of Rigidity (N/m2)(m)I = Moment of Inertia (m4)(m) l = length (m) M = moment (Nm) V = Traverse Shear force Force (N) x = distance from along beam (m) z = distance from neutral (m)γ = Angular strain = δ/lδ = deflection (m)τ = shear stress (N/m2)τ max = Max shear stress (N/m2)θ = Deflection (radians) Strain Energy Pure Tension and compression Strain Energy Pure Torsion Strain Energy Direct Shear Alternatively allowing z to be a variable:.. Strain Energy Beam in bending Illustrating the case when M is fixed and note related to x.