
LEGO. LEGO::NXT - LEGO NXT Direct Commands API. use LEGO::NXT; my $nxt = LEGO::NXT->new( 'xx:xx:xx:xx:xx:xx', 1 ); $nxt->play_sound_file($NXT_NORET, 0,'!
Attention.rso'); $res = $nxt->get_battery_level($NXT_RET); $res = $nxt->set_output_state( $NXT_RET, $NXT_SENSOR1, 100, $NXT_MOTORON|$NXT_REGULATED, $NXT_REGULATION_MODE_MOTOR_SPEED, 0, $NXT_MOTOR_RUN_STATE_RUNNING, 0, ); This module provides low-level control of a LEGO NXT brick over bluetooth using the Direct Commands API. This API will not enable you to run programs on the NXT, rather, it will connect to the NXT and issue real-time commands that turn on/off motors, retrieve sensor values, play sound, and more.
Users will leverage this API to control the NXT directly from an external box. This is known to work on Linux. There is a manual for this module with an introduction, tutorials, plugins, FAQ, etc. Neural Network Manager for Lego Mindstorms NXT. The Neural Network manager for NXT is a Java Graphical User Interface which allows Lego fans to easily create, manage and train a neural network which can be exported and used in any program to be designed to run on the LEGO NXT.
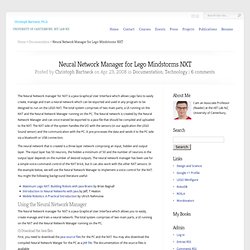
The total system comprises of two main parts, a UI running on the NXT and the Neural Network Manager running on the PC. Www.eng.buffalo.edu/~colinlea/Bluetooth_With_NXT.pdf. Working with various motors in your NXT projects - Part 1. Robot Square - (Mindstorms) Robot design and development. Articles: SABRE: Behaviour-Based Wall Follower in NXT-G. Behaviour-Based Wall Follower in NXT-G I’ve made a 45-minute-long tutorial video showing how to program a MINDSTORMS NXT Robot in a basic behaviour-based way — a great way to start with a simple robot program and work up to a complex-yet-still-manageable one.

The video shows the concepts behind behaviour-based programming, and, in a step-by-step fashion, how to program the robot to do this in NXT-G, what the robot does, and how to debug the code to make the robot exhibit the desired behaviour. Here are a couple of diagrams from the video: We will indue Exo-Scout (the robot) with behaviours to drive forward, hug the wall, avoid the wall, and to escape when he crashes into something. It sounds contradictory, but it all works out. Conceptually, the behaviours are organized into triggers, actions, and something called an arbiter.
Download Here are the following choices for downloading the video. (If you aren’t sure which video format to choose, you probably want to go with the Quicktime video.) Course: Feedback control design for LEGO Mindstorm NXT based system (ALICE 2011) Third-party sensors: a list of NXT compatible manufacturers. Following the article on the review of some sensors HiTechnic, comments and questions make me think that few are aware of the possibility offered by third party companies, to buy sensors or interfaces developed specifically for the LEGO NXT brick, or compatible.
Here is a draft of answer as a list of products currently available, and their manufacturers. HiTechnic NXT Acceleration / Tilt Sensor*: contains a three axis accelerometer that measures acceleration in three axes, x, y and z. Acceleration is measured in the range of -2g to +2g with scaling of approximately 200 counts per g. NXT Color Sensor V2*: operates by using a single white LED to illuminate the target and analyzes the color components (RGB) of the light reflected by the target’s surface and calculates a Color Number. . * These sensors have been tested in the article on the review of some sensors HiTechnic Mindsensors NXTCam-v2: This vision subsystem tracks upto 8 colored objects.
Codatex Vernier LEGO Education POB Technology. Hacking the LEGO NXT. If you are a millionaire and able to buy a LEGO Mindstorms NXT, you may find kind of difficult to hack it or create homemade sensors.
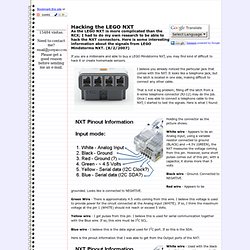
I believe you already noticed the particular jack that comes with the NXT. It looks like a telephone jack, but the latch is located in one side, making difficult to connect any other cable. That is not a big problem; filling off the latch from a 6-wires telephone connector (RJ-12) may do the job. Michael Gasperi's LEGO Mindstorms Sensor Input Page. Designing Lego Mindstorms NXT sensors - Stew’s Spot. I bought a Lego Mindstorms kit last month to mess with, I’ve got some ideas for robot localisation that I want to try out.

Anyway, the kit comes with a sonar range finder but I wanted a little more accuracy and smaller detection area. I’ve got a bunch of Sharp rangefinders from another project and they would work perfectly for what I wanted. A couple of companies sell after market sensors for the NXT, Mindsensors and HiTechnic but it’s much more fun to design and build your own. For a little background on how the Sharp sensors work, Acroname Robotics has a good article on them. Controlling the Motors. Controlling the Motors Introduction to the Motor class.
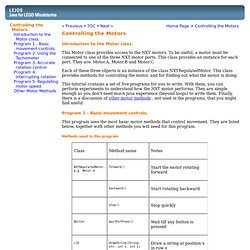
This Motor class provides access to the NXT motors. To be useful, a motor must be connected to one of the three NXT motor ports. This class provides an instance for each port. They are: Motor.A, Motor.B and Motor.C. Each of these three objects is an instance of the class NXTRegulatedMotor. This tutorial contains a set of five programs for you to write. Program 1 - Basic movement controls. This program uses the most basic motor methods that control movement. Methods used in this program What the program should do: Display "Program 1 " in row 0 of the LCD.
Solution.