
Sensors - Double Pendulum. You have two options to "decode" the quadrature signal, either through a software algorithm or through a dedicated IC.

Software is probably the path of least resistance, but it has the detriment of adding additional load to the processor. Algorithms specific to the Arduino include: Keith's Electronics Blog - Has an arduino example of a knob and a library for implementing multiple quadrature signals. This might not work because it messes with the PWM signal.Arduino Rotary Encoders - Very basic quadrature decoding, won't work for time sensitive stuff.PIC Quadrature decoder - A couple different ways of decoding quadrature.
There are a number of ICs that will take the quadrature signal and turn it into counts. This is pretty cool, because it means that you can get very high fidelity encoding of position with almost no processing cost. Quadrature IC - LS7366R Hardware I am implementing the LSI/CSILS7366R (vendor) and using the SPI 4-wire communication protocol. Software Definitions. 58291. WMH Transmissions Ltd - Product List - W10. 10mm Diameter Hardened Steel Shaft - GSF Promounts. Motionco_Pulleys & Belts_Neoprene MXL Timing Belts_Buy Online.
All self-aligning linear bearings aren't created equal. Although most self-aligning linear bearings look similar, each design can have different operating characteristics.
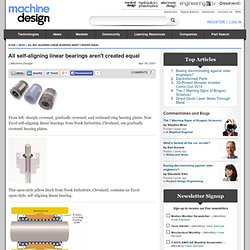
Take bearing plates, for example. The bearing plate or outer race surrounds a plastic ball-bearing retainer. The plate transfers load from the bearing bore — through the bearing balls — to the shaft or "inner" race. There are three basic bearing plate types: sharply crowned, gradually crowned, and radiused. Bearings with a sharply crowned, segmented bearing plate can typically handle several times the load of bearings without the feature.
These independent races also make possible zero clearance between the ball bearings and shaft. The gradually crowned bearing plate functions much the same way as the sharply crowned design, but puts more material in contact with the bearing bore surface. The third design combines a flat, segmented outer bearing plate with a radiused outer ring, hence the name. Also consider how the outer race is made. Finally, don't neglect seal design. Timing Belts. Introduction Synchronous / Timing belts are basically endless flat belts which pass over pulleys- the belts having grooves which mate with teeth on the pulleys.
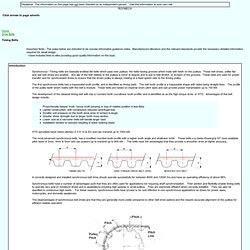
These belt drives, unlike flat and vee belt drives are positive. Any slip of the belt relative to the pulleys is minor in degree and is due to belt stretch, or erosion of the grooves. These belts are used for power transfer and for synchronised drives to ensure that the driven pulley is always rotating at a fixed speed ratio to the driving pulley. The first synchronous belts had a trapezoidal tooth profile, and is identified as timing belts. The development of the classical timing belt with has a rounded tooth (curvilinear tooth profile) and is identified as as the high torque drive, or HTD. HTD sprockets have metric pitches (3 5 8 14 & 20) and can transmit up to 1000 kW. The most advanced synchronous belts, has a modified rounded tooth profile with a higher tooth angle and shallower tooth. ConstructionBelts Pulleys HTD- Curvilinear. RoboCutters.co.uk. Motionco_Pulleys & Belts_Neoprene MXL Timing Belts_Buy Online.
100:1 MFA Heavy Duty Epicyclic Motor Gearbox. Product details 100:1 MFA Heavy Duty Epicyclic Motor Gearbox This robust module boasts a powerful high quality five pole motor with sintered bronze bearings and an integrated all-metal gearbox with bronze output bearings.

The gearbox is epicyclic (planetry) which is smaller and more efficient than other types allowing the use of smaller motors and weighs less. The output shaft is cental and 6mm in diameter. Bulk Prices Why not tell us and our B2B sales team about your specific business needs and expectations? At Maplin, we’re always looking for innovations and technology that can help your business work more efficiently. With a dedicated business team and special services available only to business customers, you can access our electronics and technology solutions through our wide network of over 200 stores, our website with more than 20,000 products or though your personal account manager over the phone.
Contact our business team on. 100:1 Metal Gearmotor 37Dx57L mm with 64 CPR Encoder. Overview This powerful brushed DC gearmotor is available in six different gear ratios and features an integrated quadrature encoder with 64 counts per revolution (CPR) of the motor shaft.
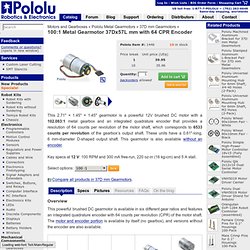
The motor and encoder portion is available by itself (no gearbox), and versions without the encoder are also available. These motors are intended for use at 12 V, though the motor can begin rotating at voltages as low as 1 V. Details for item #1446 Exact gear ratio: (25×30×28×28×30) / (10×10×12×12×12) ~~ bb(102.083:1) Gearmotor Dimensions The face plate has six mounting holes evenly spaced around the outer edge threaded for M3 screws. Please note that unlike our smaller metal gearmotors, these 37D mm gearmotors have output shafts with a diameter of 6 mm. Linear Bearing.