
Mobsya/aseba: Aseba is a set of tools which allow beginners to program robots easily and efficiently. To contact us, please open an issue. Event-driven programming. Computer programming paradigm Event handlers[edit] A trivial event handler[edit] Because the code is for checking for events and the main loop are common amongst applications, many programming frameworks take care of their implementation and expect the user to provide only the code for the event handlers.
In this simple example, there may be a call to an event handler called OnKeyEnter() that includes an argument with a string of characters, corresponding to what the user typed before hitting the ENTER key. To add two numbers, storage outside the event handler must be used. Globally declare the counter K and the integer T. While keeping track of history is normally trivial in a sequential program because event handlers execute in response to external events, correctly structuring the handlers to work correctly when called in any order can require special attention and planning in an event-driven program. Creating event handlers[edit] Exception handlers in PL/I[edit] Common uses[edit] ThymioCheatSheet fr. Sans titre.
Extension ScratchX pour Thymio. Syntax: avancer(distance (~mm)) Avancer de distance en "simili mm". Si la distance est négative, le robot recule. Vitesse environ 100mm/s. Si la valeur est non renseignée, le robot ne s'arrête pas. avancer(distance (~mm)) avec vitesse (valeur (~mm/s)) Liens Github. Sans titre. Extension ScratchX pour Thymio. A propos - Blockly4Thymio. Thymio Device Manager — Aseba 1.7-alpha documentation. The Thymio Device Manager is a bridge between the Thymio robots and the various applications (Aseba Studio, VPL, Blockly, Scratch, etc).
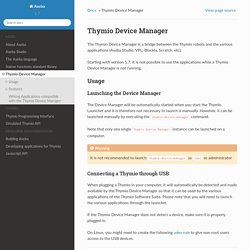
Starting with version 1.7, it is not possible to use the applications while a Thymio Device Manager is not running. Usage¶ Sans titre. Interface de programmation - Thymio & Aseba. Cette page décrit les possibilités de programmation du Thymio.
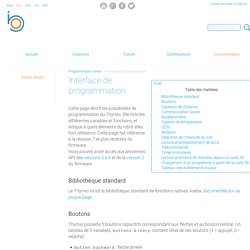
Elle liste les différentes variables et fonctions, et indique à quels éléments du robot elles font référence. Cette page fait référence à la révision 7 et plus récentes du firmware. Vous pouvez avoir accès aux anciennes API des versions 3 à 6 et de la version 2 du firmware. Bibliothèque standard Le Thymio inclut la bibliothèque standard de fonctions natives Aseba, documentée sur sa propre page. Boutons.
Réglage du volume - Thymio & Aseba. Premiers pas - Thymio & Aseba. Allumer et éteindre Thymio Pour allumer le robot, il suffit d'appuyer et de maintenir le doigt sur le rond qui se trouve au centre des flèches jusqu'à ce que le robot émette un son et devienne vert.
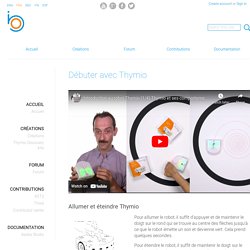
Cela prend quelques secondes. Pour éteindre le robot, il suffit de maintenir le doigt sur le rond central quelques secondes jusqu'à ce que le robot joue une mélodie et s'éteigne complètement. ThymioCheatSheet fr. Interface de programmation - Thymio & Aseba. Calibrations des moteurs - Thymio & Aseba. Thymio-II comportements de base. Thymio-II wiki. Wireless Thymio-II - Mobsya. Retour à la liste des produits Thymio, un robot éducatif Thymio est un petit robot mobile se définissant aussi bien comme un outil pédagogique que comme un jouet.

Il a pour but de permettre aux jeunes de découvrir le monde fascinant des robots et de la technologie en le programmant et en jouant avec ses nombreuses fonctionnalités. Un robot prêt à l’emploi Thymio sort de sa boîte déjà monté, on le démarre en quelques secondes. À propos de Thymio - licences. INRIA - Collaboration avec Thymio. Inria, institut national de recherche dédié au numérique, promeut « l’excellence scientifique au service du transfert technologique et de la société » Les 2 600 personnes qui y travaillent sont issues des meilleures universités mondiales et relèvent les défis des sciences informatiques et mathématiques.
Inria est organisé en « équipes-projets » qui rassemblent des scientifiques aux compétences complémentaires autour d’un projet scientifique focalisé. Ces mêmes personnes jouent également un rôle important dans la transmission du savoir au plus grand nombre. Élargissement des usages de Thymio La communauté d’utilisateurs qui s’est développée autour de Thymio génère des nouvelles idées et invente constamment des nouveaux usages. Depuis 2014, Inria participe à la vie de cette communauté et développe des logiciels qui élargissent les usages de Thymio. Thymio mechanical parts - Google Drive. Attribution-ShareAlike 3.0 Unported — CC BY-SA 3.0. Evenèment R2T2 Mars - Thymio & Aseba. A propos de cet événement Il existe de nombreux concours robotiques, ateliers robotiques ou ressources de robotique en ligne, mais la technologie d'aujourd'hui nous permet de faire beaucoup plus.
Le robot Thymio peut être commandé et programmé à distance depuis partout sur la planète, les gens pourraient collaborer pour résoudre la tâche complexe et la programmation est plus facile que jamais. Alors pourquoi ne pas aller plus loin, comme nous sommes habitués à le faire à l'EPFL et dans le NCCR Robotics et réunir des enfants de toute la planète et résoudre ensemble une tâche incroyable. Nous avons choisi une tâche inspirée de la robotique spatiale, avec des idées et des essais préliminaires faits avec l'Ecole internationale de Genève et durant un camp d'été avec une classe spéciale MINT de l'école de Köniz, Berne.
Des détails de cette expérience préliminaire se trouvent ici. But de cet événement Age et nombre des participants Niveau de programmation Ce que les participants vont obtenir. Initiateur du projet Thymio - EFPL. À propos L’EPFL est la plus cosmopolite des universités techniques européennes.
Elle accueille des étudiants, professeurs et collaborateurs de plus de 120 nationalités. A vocation à la fois suisse et internationale, l’EPFL est centrée sur trois missions : l’enseignement, la recherche et le transfert de technologies. L’EPFL collabore avec un important réseau de partenaires comprenant notamment les autres universités et hautes écoles, les écoles secondaires et gymnases, l’industrie et l’économie, les milieux politiques et le grand public, ceci dans le but d’avoir un véritable impact pour la société.
Création de Thymio et de Mobsya En 2006 le Laboratoire de Systèmes Robotiques (LSRO) de l’École Polytechnique Fédérale de Lausanne (EPFL), dirigé par Francesco Mondada, développat un robot bon marché pour les enfants sur la base d’une idée née à l’École Cantonale d’Art de Lausanne (écal). Les projets autour de Thymio - R2T2 mission sur mars. Mobsya Media Kit - Google Drive. Mobsya/aseba-target-thymio2: Thymio 2 firmware. Mobsya/electronics-thymio2-rf: This is the official Wireless Thymio II module electronics repository. Mobsya/electronics-thymio2: This is the official Thymio II electronis repository.
Sans titre. Sans titre. Simulateur Thymio. Thymio Device Manager — Aseba 1.7-alpha documentation. Thymio Programming Interface — Aseba 1.7-alpha documentation. Simulated Thymio API. Formulaire Revendeur. Github repository. Sans titre. Cette page illustre un exemple de machine qui teste la réflexion optique d'un papier. La machine dispose d'un levier à l'avant qui peut déplacer un échantillon de papier à une distance variable en face du capteur de proximité central avant. Une surface de référence se déplace en face d'un capteur latéral et permet d'avoir une référence de distance. Cette machine est réalisée uniquement avec des pièces du kit de construction LEGO Technic 8069. Le déplacement du papier coloré se fait avec un bras actionné per l'une des roues du Thymio II.
Voici une séquence de positions possibles: Cette machine se branche à l'ordinateur qui peut récupérer les données associées à des évènements: La séquence de mesure est la suivante: d'abord on ramène le papier coloré proche du capteur, ensuite on l'éloigne lentement en prenant les mesures. Le code nécessaire pour réaliser la démarche de la vidéo est ci-dessous. . où XXX est un numéro attribué de cas en cas par le Mac.