
Quadcopter. Unlike most helicopters, quadcopters use 2 sets of identical fixed pitched propellers; 2 clockwise (CW) and 2 counter-clockwise (CCW).

These use variation of RPM to control lift and torque. Control of vehicle motion is achieved by altering the rotation rate of one or more rotor discs, thereby changing its torque load and thrust/lift characteristics. [citation needed] Early in the history of flight, quadcopter (referred to as 'quadrotor') configurations were seen as possible solutions to some of the persistent problems in vertical flight; torque-induced control issues (as well as efficiency issues originating from the tail rotor, which generates no useful lift) can be eliminated by counter-rotation and the relatively short blades are much easier to construct. A number of manned designs appeared in the 1920s and 1930s. More recently quadcopter designs have become popular in unmanned aerial vehicle (UAV) research.
BoardMega2560. Overview The Arduino Mega 2560 is a microcontroller board based on the ATmega2560 (datasheet).

How to control a brushless motor through a ESC with Arduino. Electronic speed control (most commonly known as ESC) are nasty beasts: not from the controlling software point of view but for the way they need to be powered up, and because they need to be calibrated.
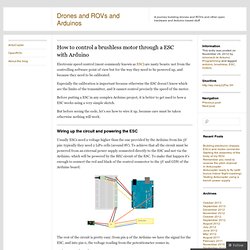
Especially the calibration is important because otherwise the ESC doesn’t know which are the limits of the transmitter, and it cannot control precisely the speed of the motor. Before putting a ESC in any complex Arduino project, it is better to get used to how a ESC works using a very simple sketch. But before seeing the code, let’s see how to wire it up, because care must be taken otherwise nothing will work. Wiring up the circuit and powering the ESC Usually ESCs need a voltage higher than the one provided by the Arduino from his 5V pin: typically they need 2 LiPo cells (around 8V).
6 DOF IMU Shield. The quadcopter : how to compute the pitch, roll and yaw » The bored engineers. After having introduced here the basics of an aircraft orientation and how to control it, this article is about actually computing the orientation of the quadcopter in space with sensors and with the Arduino.
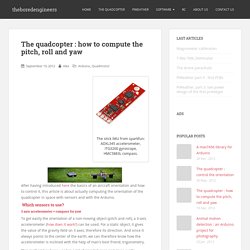
Which sensors to use? 3 axis accelerometer + compass for yaw To get easily the orientation of a non-moving object (pitch and roll), a 3-axis accelerometer (how does it work?) Can be used. For a static object, it gives the value of the gravity field on 3 axes, therefore its direction. This method has been used in a lot of smartphones and gives pretty accurate results, if you are not moving.
Another problem of accelerometers is their sensitivity to vibrations. As you can see, using only an accelerometer is not a valid option. Gyroscope The most common used sensor in quadcopter control boards is the gyroscope sensor. The first problem raised is caused by the nature of the sensor. XBee Pro 900 RPSMA (Sale) Description: The XBee-PRO 900 RF module is ideally suited for low-latency point-to-multipoint networking applications.

Capable of point-to-point, peer-to-peer and point-to-multipoint networking, the XBee-900 is ideal for solutions where RF penetration and absolute transmission distance are paramount to the application. As a member of the XBee family of RF products, the module is easy-to-use, shares a common footprint, and leverages Digi’s Drop-in Networking solutions including gateways and adapters. No configuration is necessary for out-of-the-box RF communications. The module’s default configuration supports a wide range of data system applications. Advanced configurations can be implemented using simple serial AT commands. 1PCX Infrared JPEG Color Camera Serial UART TTL Level. Navigatron v2 - I2C GPS. VPN1513 GPS Receiver w/ Antenna.
Most Advanced HD GoPro Ever. GoPro HD Hack. The most wanted cam to be used on UAVs is now partially hacked.
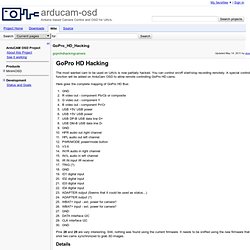
You can control on/off start/stop recording remotely. A special control function will be added on ArduCam OSD to allow remote controlling GoPro HD cams. Here goes the complete mapping of GoPro HD Bus: Brushless Gimbal for Aerial Photography Drones. Every self-respecting drone used for aerial photography needs a gimbal.

Good gimbals are very expensive, cheap ones are not smooth. Brussless Gimbals (BLG) to the rescue! In there recent months there has been a flurry of activity around this new way of building camera gimbals. Instead of servo motors, a BLG uses re-wound Brushless RC motors in a direct drive configuration. The cheapest of all BLGs on the market today (and readily available) is the GoPro BLG and Controller (Martinez v1) from RcTimer. Base station. Land surveying[edit] In the context of external land surveying, a base station is a GPS receiver at an accurately-known fixed location which is used to derive correction information for nearby portable GPS receivers.

This correction data allows propagation and other effects to be corrected out of the position data obtained by the mobile stations, which gives greatly increased location precision and accuracy over the results obtained by uncorrected GPS receivers. Computer networking[edit] iPad. MacBook Pro. Google Maps. Maps SDK for iOS. BoardMega2560. XBee Pro 900 RPSMA (Sale)
USB Host Shield Hardware Manual. 1.

Introduction USB Host Shield is an inexpensive ( $25 for the full-sized board and $20 for the Mini variant ) add-on board for Arduino development platform. The shield provides USB Host interface, allowing full and low-speed communication with USB devices – keyboards, mice, joysticks, MIDI, digital cameras, Bluetooth, and many others. In USB Shield section of this site you can find many articles describing projects and code examples written for this shield. On this page, I’m giving detailed description of board’s hardware. 2.
USB Host shields are available in two form factors – full size and Mini. Full-size shieldUSB Host Shield 2.0 exists in 2 configurations – “Standard” and “3.3V”. Power Select 2 solder jumpers marked “5V” and “3.3V”. USB Host Shield 3.3V differences Notice that digital and analog pins have parallel rows of pads next to them. Layout of USB Host Mini SS, MOSI, MISO, SCK are SPI signals. 3. Microsoft Xbox 360 Wireless Gaming Receiver for Windows - Game controller adapter - USB - External. 27 reviews Write a review Edit your review The Xbox 360 Wireless Gaming Receiver for Windows lets you take your quality, wireless gaming experiences that you enjoy on your console and experience them on your Windows gaming platform.
Microsoft Xbox 360 Controller Game pad - for Game console.