
InMoov » open-source 3D printed life-size robot.
RC8 pivot boule rotule barre anti-roulis (pas vis) (x4) AS8909. Portal - Robot Maker. Bonjour à toutes et à tous!

Je m'appelle Jérôme, j'ai 34 ans et je viens de m'inscrire sur votre forum pour pouvoir y puiser l'information nécessaire à "mon projet". J'y connais pas grand chose en robotique, si ce n'est ce que j'ai appris à l'école (électronique, soudure, programmation C,..) autant dire presque rien, mais mon fils de 5 ans souhaite que je lui fabrique un robot. Ni une ni deux en bon papa que je suis, je lui ai répondu "d'accord". Je souhaitais commencer par me lancer dans la construction du Cocotix dont j'ai vu le tutoriel sur votre site, et qui m'a semblé suffisament clair et simple pour essayer de la faire. J'aurais probablement besoin d'aide, donc je survolerai le forum car je ne serai surement pas le seul à me poser des questions sur ce projet Cocotix v1.
J'ambitionne par la suite (attention je suis un ouf) de passer la construction du Cocotix version 2, celui qui suit la lumière et qui ne semble pas être beaucoup plus difficile que la version 1. A plus. App Inventor Classic. What's Happening with the original version of App Inventor?!

The orange "Create" button at the top right of every page of this site links to App Inventor 2.To get to App Inventor Classic, click the Invent button to the right. (Only available on this page!) As of December 3, 2013, visitors to appinventor.mit.edu will find that page of links to App Inventor 1 have been replaced by an introduction to App Inventor 2. But App Inventor 1 is still here, and your App Inventor 1 projects are still here.
You can find them at the same site as always-- beta.appinventor.mit.edu. Arduino - Control 2 DC Motors Via Bluetooth. UPDATE 23-12-2013: changed their whole website… So the source file that previously you could use to edit on their website, only works with AppInventor version 1.0 or also called classic that you can see here Click the button: “Invent your own Apps now” .
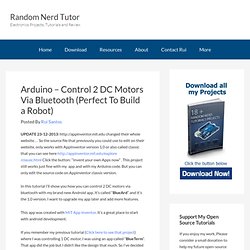
This project still works just fine with my app and with my Arduino code. But you can only edit the source code on Appinventor classic version. In this tutorial I’ll show you how you can control 2 DC motors via bluetooth with my brand new Android app. It’s called “BlueArd” and It’s the 1.0 version. Wiki - CMUcam5 Pixy - CMUcam: Open Source Programmable Embedded Color Vision Sensors. NUCLEO-F030R8 STMicroelectronics. Introduction à Makefile. Module de reconnaissance vidéo "CMUcam5" Orca Robotics. MOOS : Main - Home Page browse. Smarter control in robotics & automation! Lidar. I make a adapter using Arduino mega 1280 to output PWM to control XV-11 LDS motor.LDS motor power directly from USB 5V with a IPS041L low side switch control with PWM.The XV-11 LDS data is connect to Arduino mega RX3 then relay senf out from TX ( USB-serial ).So the user can use Xevel's program to see the lidar plot.

[update] Currently it is has simple close loop control. Arduino mega code you can get from here( github). Arduino « Juan Antonio Breña Moral. Juan Antonio Breña Moral My personal opinions about this world.
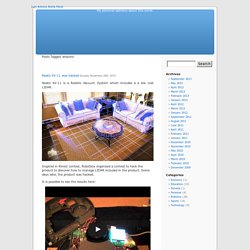
Posts Tagged ‘arduino’ Neato XV-11 was hacked Sunday, November 28th, 2010. Buy RPLIDAR - 360 degree Laser Scanner Development Kit [830018001] MTRAN3 Modular Robot. Module de détection US HC-SR04.
Ros. Triple Axis Magnetometer Breakout - MAG3110 - SEN-10619. I’m also having this problem, though I’m reading it out on a Raspberry Pi.
I’m getting 0xFF (-1 C) most of the time, and occasionally 0x00 (0C), in ambient conditions around 25C. I never get any other values. Everything else works perfectly, except temp. I’ve tried reading it both before and after the magnetic values (since the device seems to do some magic when you read the X MSB), and with and without delays in between them (just to see what’s up). I’ve even tried reading all the registers at once, and I am getting correct values in every register, including those immediately before (Z user offset LSB) and immediately after (CTRL 1) the DIE_TEMP register. I know that -1C and 0C are both theoretically “valid” temperatures, but 0xFF and 0x00 sure look a lot like either hardware problems (letting SDA float high, or holding it low) or else programming problems (-1 and 0 are both often used as “error conditions”).
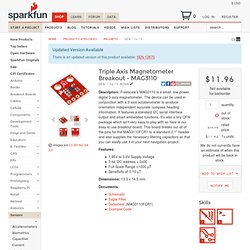
Does anyone have one with a sane DIE_TEMP? Triple Axis Accelerometer and Gyro Breakout - MPU-6050 - SEN-11028. Description: The MPU-6050 is a serious little piece of motion processing tech!

By combining a MEMS 3-axis gyroscope and a 3-axis accelerometer on the same silicon die together with an onboard Digital Motion Processor™ (DMP™) capable of processing complex 9-axis MotionFusion algorithms, the MPU-6050 does away with the cross-axis alignment problems that can creep up on discrete parts. Our breakout board for the MPU-6050 makes this tiny QFN package easy to work into your project. Every pin you need to get up and running is broken out to 0.1" headers, including the auxiliary master I2C bus which allows the MPU-6050 to access external magnetometers and other sensors. Having a hard time picking an IMU? Our Accelerometer, Gyro, and IMU Buying Guide might help! Dimensions: 1 x 0.6 x 0.09" (25.5 x 15.2 x 2.48mm) Features: Documents: