
Mbed in a Nutshell - Interactive Device Design Fall 2014. Hardware Platform: Freescale KL25Z with mbed toolchain This semester, we will use 32-bit ARM Cortex microcontrollers for your homeworks and class project.
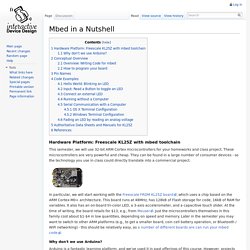
These microcontrollers are very powerful and cheap. They can be found in a large number of consumer devices - so the technology you use in class could directly translate into a commercial project. In particular, we will start working with the Freescale FRDM KL25Z board, which uses a chip based on the ARM Cortex-M0+ architecture. This board runs at 48MHz, has 128kB of Flash storage for code, 16kB of RAM for variables. Why don't we use Arduino? Arduino is a fantastic learning platform, and we've used it in past offerings of this course.
Conceptual Overview Overview: Writing Code for mbed To program the board, we'll use the mbed online IDE. One downside of the online IDE is that it does not have an integrated debugger. How to program your board The steps below are roughly the same for all mbed-compatible hardware platforms. ICS139W Fall 2014. [Schedule] [Submission instructions] [Presentation instructions] Assignments: [ Resume ] [Statement] [Wikipedia] [Tutorial] [Pitch] Presentations: [ Pitch] [ Tutorial] Administrivia News: Website in progress.
We will have an in-class writing sample on the first day of class. Please come prepared with a pen. Course goals Even if you intend to spend your entire professional life designing software or configuring networks, you will spend more of it writing prose - memos, proposals, documentation, electronic mail - than you will writing code. Prerequisites Every student should be able to write cogent, grammatical English at the level expected in Writing 39C. Required course materials Style: Lessons in Clarity and Grace by Joseph Williams.
Optional materials.
KMODDL - Kinematic Models for Design Digital Library. Physics animations and film clips: Physclips. Lecture Notes Online. Robotics. MooCs. Learn to code. Misc. Stan Courseware. An Algorithm for a Good Research Paper. Why is Research Difficult for Beginning Ph.D.

Students? Part of the difficulty with research at the beginning is that (a) it is never a burning thing - you can always do it tomorrow, and (b) it is not clear (at least before you complete a couple of research papers) what needs to be done and where you're supposed to start. This is why it is not very surprising that many students do not come up with revolutionary ideas and get quite frustrated in their first one-to-three years in the Ph.D. program -- very few such ideas come in a vacuum. In that respect, you, the reader, should definitely not feel that you're not up for research/Ph.D just because you did not come up with any bright idea yet. It just takes determination and some guidance, especially in earlier stages, and especially if you did not have the experience in individually-led research. So you are determined. How long does it take to do a Ph.D.? About thinking up new papers... You need determination and stamina here. Fare Well. Teaching Tree.
CTM: Matlab Basics Tutorial. Key MATLAB commands used in this tutorial are: plot , polyval , roots , conv , deconv , inv , eig , poly , tf , zero Contents MATLAB is an interactive program for numerical computation and data visualization; it is used extensively by control engineers for analysis and design.

There are many different toolboxes available which extend the basic functions of MATLAB into different application areas; in these tutorials, we will make extensive use of the Control Systems Toolbox. MATLAB is supported on Unix, Macintosh, and Windows environments; a student version of MATLAB is available for personal computers. For more information on MATLAB, please visit the MathWorks link at the top of the page. The idea behind these tutorials is that you can view them in one window while running MATLAB in another window. Vectors Let's start off by creating something simple, like a vector. A = [1 2 3 4 5 6 9 8 7] a = 1 2 3 4 5 6 9 8 7 t = 0:2:20 t = 0 2 4 6 8 10 12 14 16 18 20 b = a + 2 b = 3 4 5 6 7 8 11 10 9 Plotting. Dan Negrut, Advanced Computational Multibody Dyanmics. Resources Edward J.
Haug, Computer Aided Kinematics and Dynamics of Mechanical Systems (Allyn and Bacon, 1989) pdf of book ME751 Discussion Forum:Forum Getting Started with ADAMS: ADAMS Tutorials ADAMS/Solver Primer: pdf On the global parameterization of the 3D rotation Stuelpnagel 1964 Paper. Chapter 9 Supplement (provided by Ed Haug) pdf. Summary of key Kinematics identities (provided by Ed Haug) pdf. An example of a very simple input file in a format used by ADAMS adm.
Math resources. Cv resources. Optimization Resources. ML resources.