
DeviceOrientation Event Specification. Abstract This specification defines several new DOM events that provide information about the physical orientation and motion of a hosting device.

Status of This Document This section describes the status of this document at the time of its publication. Other documents may supersede this document. A list of current W3C publications and the latest revision of this technical report can be found in the W3C technical reports index at This document was published by the Geolocation Working Group as a Last Call Working Draft. Gee!Design » Unity program for connection to Teensy + MPU-9150. I recently managed to connect an MPU-9150 breakout board to a Unity3D application, using a Teensy2.0 as an interface (also got it working with Teensy++ 2.0 and Arduino Uno).

With this combination I can easily rotate an object in the real world and have a counterpart in a virtual world do the same in real time. I chose the MPU-9150 because its”sensor fusion” functions make this possible without much mathematics. I quite like the result, and I want to share my experiences and code! On this page, I go into the details of the Unity program. X-io Technologies. XioTechnologies/Gait-Tracking-With-x-IMU. XioTechnologies/x-IMU-GUI.
MAVLink Micro Air Vehicle Communication Protocol - QGroundControl GCS. MAVLink is a very lightweight, header-only message marshalling library for micro air vehicles.
It can pack C-structs over serial channels with high effiency and send these packets to the ground control station. It is extensively tested on the PX4, PIXHAWK, APM and Parrot AR.Drone platforms and serves there as communication backbone for the MCU/IMU communication as well as for Linux interprocess and ground link communication. MAVLink was first released early 2009 by Lorenz Meier under LGPL license. Message Specification Integration Tutorials These tutorials show how to integrate MAVLink with your autopilot or Linux robot. Arduino code for IMU Guide algorithm. Using a 5DOF IMU (accelerometer and gyroscope combo) This article introduces an implementation of a simplified filtering algorithm that was inspired by Kalman filter.

The Arduino code is tested using a 5DOF IMU unit from GadgetGangster – Acc_Gyro . The theory behind this algorithm was first introduced in my Imu Guide article. The Acc_Gyro is mounted on a regular proto-shield on top of an Arduino Duemilanove board. Parts needed to complete the project: – Arduino Duemilanove (or similar Arduino platform) – Acc_Gyro IMU board – Protoshield (optional) – Breadboard – Hook-up wire 22AWG The hook-up diagram is as follows: Acc_Gyro <—> Arduino 5V <—> 5V GND <—> GND AX <—> AN0 AY <—> AN1 AZ <—> AN2 GX4 <—> AN3 GY4 <—> AN4 Once you have completed the hardware part, load the following sketch to your Arduino. Gyroscopes, Accelerometers and the Complementary Filter. How Balance Works:- In teaching a robot how to stand straight and not fall over, we need to understand how balance really works.
Balance is something we take for granted in our daily lives, most of us are actually pretty good at it, until we have had a little too much to drink. Here is how I think balance (writ easy) works: En Garde! Microsoft Creates Smartphone Tech for Virtual Sword Fighting. Microsoft Research has developed a way for phones to measure how far away they are from each other, making the SwordFight game possible.
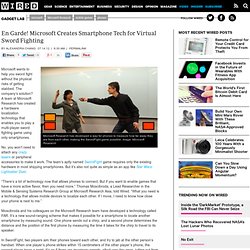
Image: Microsoft Research Microsoft wants to help you sword fight without the physical risks of getting stabbed. The company’s solution? A team at Microsoft Research has created a hardware localization technology that enables you to play a multi-player sword fighting game using only smartphones. No, you won’t need to attach any crazy lasers or peripheral accessories to make it work. “There’s a lot of technology now that allows phones to connect. Moscibroda and his colleagues on the Microsoft Research team have developed a technology called FAR. In SwordFight, two players aim their phones toward each other, and try to jab at the other person’s handset. The process of measuring distance with sound is nothing new. “If you think about the fact that you could only take one measurement per second, you could have an error of 4 meters. AN3397 Implementing Positioning Algorithms Using Accelerometers - AN3397.pdf. Doi:10.1016/j.robot.2004.02.001 - kalman_imu_gps.pdf.
PaparazziUAV. Using Accelerometers to Estimate Position and Velocity. 1.
Introduction We are commonly asked whether it is possible to use the accelerometer measurements from CH Robotics orientation sensors to estimate velocity and position. The short answer is “yes and no.” It depends entirely on how much accuracy is needed. In general, accelerometer-based position and velocity estimates from low-cost sensors (hundreds of US dollars instead of tens of thousands) are very poor and are simply unusable. Nevertheless, not all application require a great deal of accuracy, and sometimes absolute accuracy is not as important as the ability to measure short-term deviations in velocity and position. In this application note, we discuss what is required to get velocity and position estimates using data from CH Robotics sensors that do not already provide accelerometer-based velocity and position as standard outputs (at the time of writing, this includes the UM6 and the UM6-LT). Gyroscopes and Accelerometers on a Chip. My last two blog entries discussed demonstrations of gyroscopes and angular momentum conservation at our school’s science fair.

One of the demonstrations I put together takes a look at how really small gyroscopic sensors, such as those in many smart phones, video game remotes or quad-copters provide information about their changing orientations. This information can be used as feedback for self-balancing (e.g. a two-wheeled scooter), navigation or as input to other applications like video games. I didn’t want to sacrifice my smart phone for this experiment.
Fortunately, chips containing gyroscopic sensors are relatively cheap. In reading up on gyroscopic chips, I found that orientation data from gyroscope sensors is prone to drift significantly over time, so gyroscopic sensors are frequently combined with additional sensors, such as accelerometers or magnetometers to correct for this effect. Getting the raw data was easy. Here is the Arduino sketch: Tutorial · ptrbrtz/razor-9dof-ahrs Wiki. Building an AHRS using the SparkFun "9DOF Razor IMU" or "9DOF Sensor Stick" Razor AHRS v1.4.2 — See the Changelog Overview Intro.
Guide to gyro and accelerometer with Arduino including Kalman filtering. This guide was first posted at the Arduino forum, and can be found here: I just reposted it, so even more will get use of it.
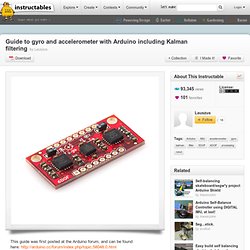
The code can be found here: Hallo everybody I recently bought this analog 6DOF (six degrees of freedom) IMU board ( from watterott.com. It uses three gyros and three accelerometers to calculate angles in three dimensions. I looked a while for some code online and how to connect with them. Before you begin you have to connect the IMU as follows: Gimbal. Gyroscope.
YEI 3-Space Sensor. User manual - protocol. MultiWii. Wireless Inertial Sensor Package.