
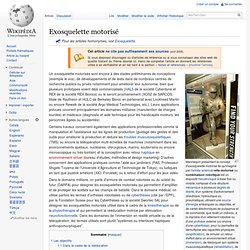
Festo ExoHand : une main robotique pilotée par un exosquelette. Lockheed Martin HULC Exo-Skeleton Prepares To Smash Human Beta Tests. The HULC exo-skeleton, Lockheed Martin’s prototype heavy lifter for infantry troops in the field, has its battery and is now ready for human trials.

If they’re successful, field tests could be close on their heels. A quick primer though, before anything else: HULC, or Human Universal Load Carrier, could be the military’s answer for troops who need to carry heavy loads—in this case 200 pounds—in the field of battle. It’s been in R&D for a while, only recently had its battery finalised, and today is preparing to enter the first of a series of serious $US1.1 million biomechanical tests that could very well decide if this ever sees the field, or combat, in a few years’ time Reports Danger Room: “Biomechanical testing will measure the energy expended by a soldier when using the HULC,” according to a Lockheed statement.
“The laboratory testing will also assess how quickly users learn to use the HULC system when carrying various loads and moving at various speeds. Company: Time Magazine Names the XOS 2 Exoskeleton "Most Awesomest" Invention of 2010. Last updated: 10/27/2011* Raytheon’s second-generation exoskeleton (XOS 2), essentially a wearable robotics suit, has been named one of the Best Inventions of 2010 by Time Magazine .

The suit was unveiled for the first time in September during an event at the company’s Salt Lake City research facility. XOS 2 is lighter, stronger and faster than its predecessor, yet it uses 50 percent less power, and its new design makes it more resistant to the environment. Hybrid assistive limb. Un article de Wikipédia, l'encyclopédie libre.

Développements[modifier | modifier le code] Le responsable du développement de HAL est le professeur Yoshiyuki Sankai de l'Université de Tsukuba. Deux prototypes ont été construits par Cyberdyne : HAL 3 ne possède que des jambes et ses servo-moteurs sont relativement encombrants.HAL 5, plus complet, possède des jambes, des bras et un torse. Un laboratoire de recherche et développement et une unité de production de HAL ont été mis en service en octobre 2008 à Tsukuba. Exosquelette motorisé. Un article de Wikipédia, l'encyclopédie libre.
Un exosquelette motorisés sont encore à des stades préliminaires de conceptions (exemple le xos), de développements et de tests dans de nombreux centres de recherche publics ou privés notamment pour améliorer leur autonomie, bien que plusieurs prototypes soient déjà commercialisés (HAL5 de la société Cyberdyne et REX de la société REX Bionics) ou le seront prochainement (XOS2 de SARCOS, filiale de Raytheon et HULC de Berkeley Bionic en partenariat avec Lockheed Martin ou encore Rewalk de la société Argo Medical Technologies, etc.). Leurs applications prévues couvrent principalement les domaines militaires (manutention de charges lourdes) et médicaux (diagnostic et aide technique pour les handicapés moteurs, les personnes âgées ou accidentés).
Les objectifs[modifier | modifier le code] L'exosquelette motorisé est fortement lié à la cybernétique et au transhumanisme, dont il peut être une des technologies représentatives des concepts. Cybernétique. Un article de Wikipédia, l'encyclopédie libre.
La cybernétique (en anglais cybernetics) est un terme, formé à partir du grec κῠβερνήτης (kubernêtês) « pilote, gouverneur », proposé en 1947 par le mathématicien américain Norbert Wiener pour promouvoir une vision unifiée des domaines naissants de l'automatique, de l'électronique et de la théorie mathématique de l'information, en tant que « théorie entière de la commande et de la communication, aussi bien chez l'animal que dans la machine »[1]. Des scientifiques d'horizons très divers et parmi les plus brillants de l'époque participèrent, autour des « conférences Macy » organisées de 1946 à 1953, à ce projet interdisciplinaire : mathématiciens, logiciens, ingénieurs, physiologistes, anthropologues, psychologues… Les contours parfois flous de cet ensemble de recherches s'articulent toutefois autour du concept clé de rétroaction (en anglais feedback) ou mécanisme téléologique.
Haptique. Un article de Wikipédia, l'encyclopédie libre.
L’haptique, du grec ἅπτομαι (haptomai) qui signifie « je touche », désigne la science du toucher, par analogie avec l'acoustique ou l'optique. Biomécatronique. Un article de Wikipédia, l'encyclopédie libre.

Cette intégration (qui nécessitera souvent des techniques de chirurgie implantatoire) s’opère autant dans le but On peut résumer la biomécatronique comme étant la science des « cyborgs dans la vraie vie ». XOS. Un article de Wikipédia, l'encyclopédie libre.

Chronologie[modifier | modifier le code] La DARPA (Defense Advanced Research Projects Agency) est l'agence responsable du développement des nouvelles technologies militaires au département de la Défense des États-Unis. En 2000, elle démarre un programme baptisé Exoskeletons for Human Performance Augmentation (Exosquelettes pour l'augmentation des performances humaines)[1]. Elle dispose pour cela d'un budget de de 75 millions de dollars. Ce programme très ambitieux vise à concevoir un exosquelette motorisé facilitant l'activité des soldats sur les champs de bataille. Un appel d'offres lancé par la DARPA reçoit 14 réponses. Le fondateur et dirigeant de Sarcos, Stephen Jacobsen est un professeur et chercheur à l'université d'Utah.