
PID library multi relay output. Asservissement PID. J'ai donc rajouté le terme dérivé, comme tout bon livre d'automatique le préconise, et voici les résultats : Cette fois ci, j'ai choisi de représenter la tension appliquée au moteur (U), le problème est bien plus flagrand ici.
Vous voyez que lorsque l'on ajoute le terme dérivé, la commande est extrémement bruitée. En réalité, on somme à la commande la dérivée de la vitesse réelle, que l'on multiplie par un gain Kd. La dérivée d'une vitesse est une accélération, cela signifie que l'on amplifie tous les bruits d'accélération et en plus, on les multiplient par un gain Kd. Donc rajoute du bruit amplifié dans la commande. Ici, le problème était visible, parce que nous avons réalisé toutes ces courbes sur un système réel (le robot Type 1).
F wescot. PID - Programmation - Robot Maker. Plop !

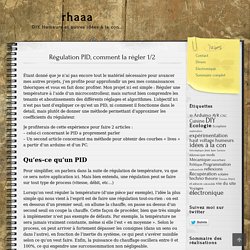
J'avais oublié que j'ai reçu des MOSFET de puissance dans ma dernière commande ! Du coup, j'ai pu, d'une part, apprendre à utiliser ce composant (je n'en avais jamais utilisé) et d'autre part, commander mon moteur ! Voila la partie commande du moteur. Rien de bien compliqué. Le transistor bipolaire viens driver le NMOS.Les roues ne tournent que dans un seul sens. Lorsque l'arduino envoie 0V, le moteur tourne et quand il envoi 5V, le moteur s'arrête. Pour le programme Arduino, j'ai mis en place un asservissement proportionnel intégrateur (PI).J'ai branché ma codeuse sur la pin 2 de l'Arduino Méga (c'est la pin d'interruption 0).
Une fois la commande calculé, je l'envoi au moteur (en inversé puisque mon moteur tourne pour une commande de 0 !!) Je n'oublie pas de remettre à 0 le nombre de changement d'état de ma codeuse ! Voila le code : Pour les coefficients de mon PI, j'ai pris 50 pour le proportionnel et 10 pour l'intégrateur. Voila. ++Black Templar. Improving the Beginner’s PID – Introduction « Project Blog. In conjunction with the release of the new Arduino PID Library I’ve decided to release this series of posts.

The last library, while solid, didn’t really come with any code explanation. This time around the plan is to explain in great detail why the code is the way it is. I’m hoping this will be of use to two groups of people: People directly interested in what’s going on inside the Arduino PID library will get a detailed explanation. Anyone writing their own PID algorithm can take a look at how I did things and borrow whatever they like. It’s going to be a tough slog, but I think I found a not-too-painful way to explain my code.
Régulation PID, comment la régler 1/2. Étant donné que je n’ai pas encore tout le matériel nécessaire pour avancer mes autres projets, j’en profite pour approfondir un peu mes connaissances théoriques et vous en fait donc profiter.
Mon projet ici est simple : Réguler une température à l’aide d’un microcontrolleur, mais surtout bien comprendre les tenants et aboutissements des différents réglages et algorithmes. L’objectif ici n’est pas tant d’expliquer ce qu’est un PID, ni comment il fonctionne dans le detail, mais plutôt de donner une méthode permettant d’approximer les coefficients du régulateur. Je profiterais de cette expérience pour faire 2 articles : – celui-ci concernant le PID a proprement parler – Un second article concernant ma méthode pour obtenir des courbes « lives » a partir d’un arduino et d’un PC.
Qu’es-ce qu’un PID Pour simplifier, on parlera dans la suite de régulation de température, vu que ce sera notre application ici. Formule PID, source ControlGuru Description du materiel. PIDLibrary. Arduino PID Library by Brett Beauregard contact: br3ttb@gmail.com.

Implémenter un PID sans faire de calculs ! » Sciences et Techniques. Sur beaucoup de site sur le web, lorsque l'on trouve un article parlant de la régulation PID, on se heurte souvent à des fonctions de transfert et à des équations dans le domaine de Laplace.
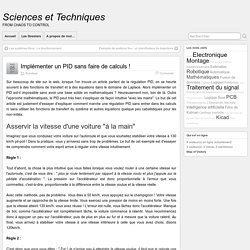
Alors implémenter un PID est-il impossible sans avoir une base solide en mathématiques ? Heureusement non, loin de là. Outre l'approche mathématiques, le PID peut très bien s'expliquer de façon intuitive "avec les mains". Le but de cet article est justement d'essayer d'expliquer comment marche une régulation PID sans entrer dans les calculs ni sans utiliser les fonctions de transfert du système et autres équations quelque peu cabalistiques pour les non-initiés.
Imaginez que vous conduisez votre voiture sur l'autoroute et que vous souhaitez stabiliser votre vitesse à 130 km/h pil-poil ! Règle 1 : Avec cette méthode, pas de problème. Règle 2 : Asservissement en vitesse d’un moteur avec Arduino » Sciences et Techniques. Bonjour à tous !

J'ai rédigé, il y a quelques temps déjà, un article expliquant comment implémenter un asservissement de type PID sans faire de calculs ! Après plusieurs retours de lecteurs, je me suis rendu compte que cet article, qui se voulait simple et compréhensible, n'était pas assez pratique. Ziegler-Nichols Tuning Rules for PID. Introduction (View more Control information) A recent opinion piece published in the trade magazine Control Engineering proposed that the Ziegler-Nichols tuning rule would serve as the basis for a coming new generation of PID technology: "Improved performance, ease of use, low cost, and training will put Ziegler and Nichols in the driver's seat...

" [1] Well, maybe so, but it seems to us that Ziegler-Nichols tuning is a very limited technology that is unlikely to be successful in that role. The rest of this article will explain why, exploring how to use the rule and where things can go wrong. The time-honored Ziegler-Nichols tuning rule [2,3] ("Z-N rule"), as introduced in the 1940s, had a large impact in making PID feedback controls acceptable to control engineers. PID was known, but applied only reluctantly because of stability concerns. Ziegler–Nichols method. The Ziegler–Nichols tuning method is a heuristic method of tuning a PID controller.
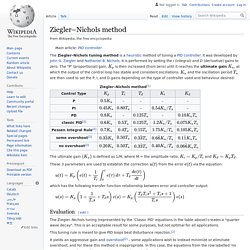
It was developed by John G. Ziegler and Nathaniel B. Nichols. It is performed by setting the I (integral) and D (derivative) gains to zero. The "P" (proportional) gain,