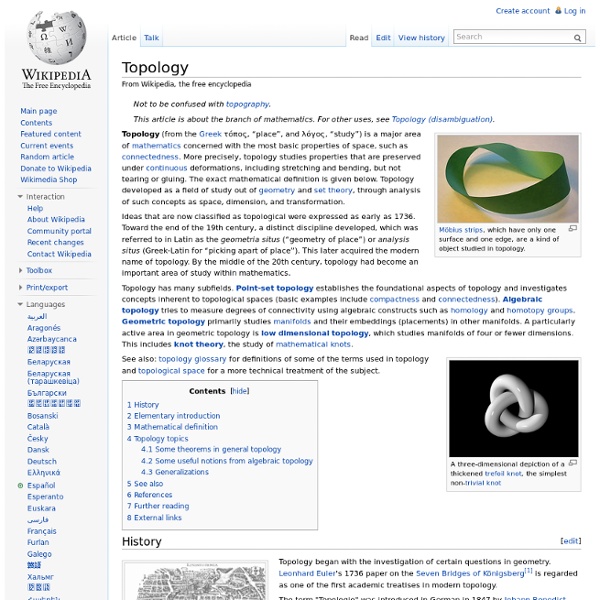
Chaos theory
A double rod pendulum animation showing chaotic behavior. Starting the pendulum from a slightly different initial condition would result in a completely different trajectory. The double rod pendulum is one of the simplest dynamical systems that has chaotic solutions. Chaos: When the present determines the future, but the approximate present does not approximately determine the future. Chaotic behavior can be observed in many natural systems, such as weather and climate.[6][7] This behavior can be studied through analysis of a chaotic mathematical model, or through analytical techniques such as recurrence plots and Poincaré maps. Introduction[edit] Chaos theory concerns deterministic systems whose behavior can in principle be predicted. Chaotic dynamics[edit] The map defined by x → 4 x (1 – x) and y → x + y mod 1 displays sensitivity to initial conditions. In common usage, "chaos" means "a state of disorder".[9] However, in chaos theory, the term is defined more precisely. where , and , is: .
Graph theory
Refer to the glossary of graph theory for basic definitions in graph theory. Definitions[edit] Definitions in graph theory vary. The following are some of the more basic ways of defining graphs and related mathematical structures. Graph[edit] Other senses of graph stem from different conceptions of the edge set. All of these variants and others are described more fully below. The vertices belonging to an edge are called the ends, endpoints, or end vertices of the edge. V and E are usually taken to be finite, and many of the well-known results are not true (or are rather different) for infinite graphs because many of the arguments fail in the infinite case. (the number of vertices). For an edge {u, v}, graph theorists usually use the somewhat shorter notation uv. Applications[edit] The network graph formed by Wikipedia editors (edges) contributing to different Wikipedia language versions (nodes) during one month in summer 2013.[3] History[edit] The Königsberg Bridge problem "[...]
Physics
Various examples of physical phenomena Physics is one of the oldest academic disciplines, perhaps the oldest through its inclusion of astronomy.[8] Over the last two millennia, physics was a part of natural philosophy along with chemistry, certain branches of mathematics, and biology, but during the Scientific Revolution in the 17th century, the natural sciences emerged as unique research programs in their own right.[b] Physics intersects with many interdisciplinary areas of research, such as biophysics and quantum chemistry, and the boundaries of physics are not rigidly defined. New ideas in physics often explain the fundamental mechanisms of other sciences[6] while opening new avenues of research in areas such as mathematics and philosophy. Physics also makes significant contributions through advances in new technologies that arise from theoretical breakthroughs. History Ancient astronomy Astronomy is the oldest of the natural sciences. Natural philosophy Classical physics Modern physics
Infinite [Internet Encyclopedia of Philosophy]
Working with the infinite is tricky business. Zeno’s paradoxes first alerted philosophers to this in 450 B.C.E. when he argued that a fast runner such as Achilles has an infinite number of places to reach during the pursuit of a slower runner. Since then, there has been a struggle to understand how to use the notion of infinity in a coherent manner. This article concerns the significant and controversial role that the concepts of infinity and the infinite play in the disciplines of philosophy, physical science, and mathematics. Philosophers want to know whether there is more than one coherent concept of infinity; which entities and properties are infinitely large, infinitely small, infinitely divisible, and infinitely numerous; and what arguments can justify answers one way or the other. Here are four suggested examples of these different ways to be infinite. This article also explores a variety of other questions about the infinite. Table of Contents 1. a. b. How big is infinity?
Graph dynamical system
In mathematics, the concept of graph dynamical systems can be used to capture a wide range of processes taking place on graphs or networks. A major theme in the mathematical and computational analysis of GDSs is to relate their structural properties (e.g. the network connectivity) and the global dynamics that result. The work on GDSs considers finite graphs and finite state spaces. As such, the research typically involves techniques from, e.g., graph theory, combinatorics, algebra, and dynamical systems rather than differential geometry. In principle, one could define and study GDSs over an infinite graph (e.g. cellular automata or Probabilistic Cellular Automata over or interacting particle systems when some randomness is included), as well as GDSs with infinite state space (e.g. as in coupled map lattices); see, for example, Wu.[1] In the following, everything is implicitly assumed to be finite unless stated otherwise. Formal definition[edit] Generalized cellular automata (GCA)[edit]
A Way to remember the Entire Unit Circle for Trigonometry
Sequential dynamical system
Phase space of the sequential dynamical system Sequential dynamical systems (SDSs) are a class of graph dynamical systems. They are discrete dynamical systems which generalize many aspects of for example classical cellular automata, and they provide a framework for studying asynchronous processes over graphs. The analysis of SDSs uses techniques from combinatorics, abstract algebra, graph theory, dynamical systems and probability theory. Definition[edit] An SDS is constructed from the following components: A finite graph Y with vertex set v[Y] = {1,2, ... , n}. It is convenient to introduce the Y-local maps Fi constructed from the vertex functions by The word w specifies the sequence in which the Y-local maps are composed to derive the sequential dynamical system map F: Kn → Kn as If the update sequence is a permutation one frequently speaks of a permutation SDS to emphasize this point. Example[edit] See also[edit] References[edit]
Newton's law of universal gravitation
Newton's law of universal gravitation states that any two bodies in the universe attract each other with a force that is directly proportional to the product of their masses and inversely proportional to the square of the distance between them. (Separately it was shown that large spherically symmetrical masses attract and are attracted as if all their mass were concentrated at their centers.) This is a general physical law derived from empirical observations by what Isaac Newton called induction.[2] It is a part of classical mechanics and was formulated in Newton's work Philosophiæ Naturalis Principia Mathematica ("the Principia"), first published on 5 July 1687. (When Newton's book was presented in 1686 to the Royal Society, Robert Hooke made a claim that Newton had obtained the inverse square law from him – see History section below.) History[edit] Early History[edit] Plagiarism dispute[edit] In this way arose the question as to what, if anything, Newton owed to Hooke. Vector form[edit]