
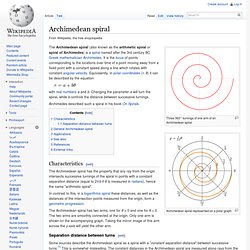
Archimedean spiral. Three 360° turnings of one arm of an Archimedean spiral Archimedean spiral represented on a polar graph with real numbers a and b.
Binary space partitioning. Overview[edit] Binary space partitioning is a generic process of recursively dividing a scene into two until the partitioning satisfies one or more requirements.

It can be seen as a generalisation of other spatial tree structures such as k-d trees and quadtrees, one where hyperplanes that partition the space may have any orientation, rather than being aligned with the coordinate axes as they are in k-d trees or quadtrees. When used in computer graphics to render scenes composed of planar polygons, the partitioning planes are frequently (but not always) chosen to coincide with the planes defined by polygons in the scene. The specific choice of partitioning plane and criterion for terminating the partitioning process varies depending on the purpose of the BSP tree.
K-d tree. A 3-dimensional k-d tree.
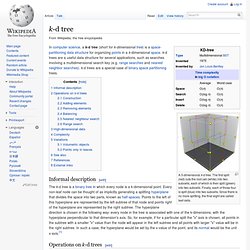
The first split (red) cuts the root cell (white) into two subcells, each of which is then split (green) into two subcells. Finally, each of those four is split (blue) into two subcells. Since there is no more splitting, the final eight are called leaf cells. Informal description[edit] Operations on k-d trees[edit] Construction[edit] Since there are many possible ways to choose axis-aligned splitting planes, there are many different ways to construct k-d trees. Median. In a sample of data, or a finite population, there may be no member of the sample whose value is identical to the median (in the case of an even sample size); if there is such a member, there may be more than one so that the median may not uniquely identify a sample member.
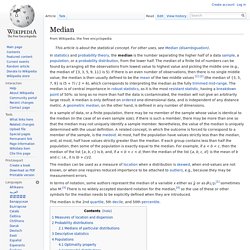
Nonetheless, the value of the median is uniquely determined with the usual definition. Hyperbolic function. Voronoi diagram. 20 points and their Voronoi cells (larger version below).
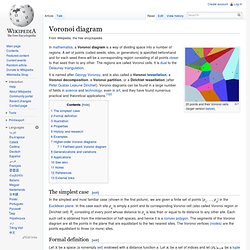
It is named after Georgy Voronoy, and is also called a Voronoi tessellation, a Voronoi decomposition, a Voronoi partition, or a Dirichlet tessellation (after Peter Gustav Lejeune Dirichlet). Voronoi diagrams can be found in a large number of fields in science and technology, even in art, and they have found numerous practical and theoretical applications.[1][2] The simplest case[edit] Formal definition[edit] Let . Gaussian function. Normalized Gaussian curves with expected value μ and variance σ2.
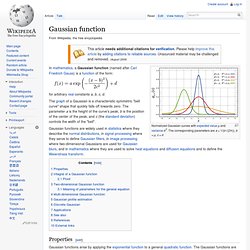
The corresponding parameters are a = 1/(σ√(2π)), b = μ, c = σ for arbitrary real constants a, b, c, d. The graph of a Gaussian is a characteristic symmetric "bell curve" shape that quickly falls off towards zero. The parameter a is the height of the curve's peak, b is the position of the center of the peak, and c (the standard deviation) controls the width of the "bell". Gaussian functions are widely used in statistics where they describe the normal distributions, in signal processing where they serve to define Gaussian filters, in image processing where two-dimensional Gaussians are used for Gaussian blurs, and in mathematics where they are used to solve heat equations and diffusion equations and to define the Weierstrass transform.
Properties[edit] Gaussian functions arise by applying the exponential function to a general quadratic function. And one obtains. Josephus problem. In computer science and mathematics, the Josephus Problem (or Josephus permutation) is a theoretical problem related to a certain counting-out game.
There are people standing in a circle waiting to be executed. Norm (mathematics) Animator. An animator is an artist who creates multiple images that give an illusion of movement called animation when displayed in rapid sequence; the images are called frames and key frames.

Animators can work in a variety of fields including film, television, and video games. Usually, an animation piece requires the collaboration of several animators. The methods of creating the images or frames for an animation piece depends on the animators' artistic styles and their field. Other artists who contribute to animated cartoons, but who are not animators, include layout artists (who design the backgrounds, lighting, and camera angles), storyboard artists (who draw panels of the action from the script), and background artists (who paint the "scenery").
Moreover, voice actors and musicians, among other talent, may be added as necessary to give the animation additional depth. BibTeX. BibTeX is reference management software for formatting lists of references.

The BibTeX tool is typically used together with the LaTeX document preparation system. Within the typesetting system, its name is styled as . Image editing. A colorized version of originally black and white photo, colorized using GIMP This is a photo that has been edited as a Bokeh effect, using a Gaussian blur.
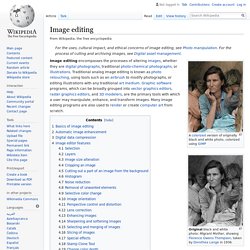
Image editing encompasses the processes of altering images, whether they are digital photographs, traditional photo-chemical photographs, or illustrations. Traditional analog image editing is known as photo retouching, using tools such as an airbrush to modify photographs, or editing illustrations with any traditional art medium. Graphic software programs, which can be broadly grouped into vector graphics editors, raster graphics editors, and 3D modelers, are the primary tools with which a user may manipulate, enhance, and transform images. Many image editing programs are also used to render or create computer art from scratch.
Basics of image editing[edit] Automatic image enhancement[edit] Digital data compression[edit] Many image file formats use data compression to reduce file size and save storage space. Watershed (image processing) A grey-level image may be seen as a topographic relief, where the grey level of a pixel is interpreted as its altitude in the relief. A drop of water falling on a topographic relief flows along a path to finally reach a local minimum. Intuitively, the watershed of a relief correspond to the limits of the adjacent catchment basins of the drops of water. In image processing, different watershed lines may be computed. In graphs, some may be defined on the nodes, on the edges, or hybrid lines on both nodes and edges. Watersheds may also be defined in the continuous domain.[1] There are also many different algorithms to compute watersheds. Scale-space segmentation. A one-dimension example of scale-space segmentation.
Expectation–maximization algorithm. In statistics, an expectation–maximization (EM) algorithm is an iterative method for finding maximum likelihood or maximum a posteriori (MAP) estimates of parameters in statistical models, where the model depends on unobserved latent variables. The EM iteration alternates between performing an expectation (E) step, which creates a function for the expectation of the log-likelihood evaluated using the current estimate for the parameters, and a maximization (M) step, which computes parameters maximizing the expected log-likelihood found on the E step.
These parameter-estimates are then used to determine the distribution of the latent variables in the next E step. EM clustering of Old Faithful eruption data. The random initial model (which due to the different scales of the axes appears to be two very flat and wide spheres) is fit to the observed data. Heuristic. A heuristic technique (/hjʉˈrɪstɨk/; Greek: "Εὑρίσκω", "find" or "discover"), sometimes called simply a heuristic, is any approach to problem solving, learning, or discovery that employs a practical methodology not guaranteed to be optimal or perfect, but sufficient for the immediate goals.
Winner-take-all. Level set method. Video of spiral being propagated by level sets (mean curvature flow) in 2D. LHS shows zero-level solution. Fast marching method. The fast marching method is a numerical method for solving boundary value problems of the Eikonal equation: Simultaneous localization and mapping. List of academic databases and search engines. Wikipedia list article This article contains a representative list of notable databases and search engines useful in an academic setting for finding and accessing articles in academic journals, institutional repositories, archives, or other collections of scientific and other articles. Databases and search engines differ substantially in terms of coverage and retrieval qualities.[1] Users need to account for qualities and limitations of databases and search engines, especially those searching systematically for records such as in systematic reviews or meta-analyses.[2] As the distinction between a database and a search engine is unclear for these complex document retrieval systems, see: the general list of search engines for all-purpose search engines that can be used for academic purposesthe article about bibliographic databases for information about databases giving bibliographic information about finding books and journal articles.
Operating services[edit] See also[edit] Binocular disparity. RANSAC. RANSAC is an abbreviation for "RANdom SAmple Consensus". Bayesian. Bayesian refers to methods in probability and statistics named after Thomas Bayes (c. 1702–61), in particular methods related to statistical inference: Bayesian probability or degree-of-belief interpretation of probability, as opposed to frequency or proportion or propensity interpretationsBayes' theorem on conditional probabilityBayesian inference These methods include: 24p. In video technology, 24p refers to a video format that operates at 24 frames per second (typically, 23.976 frames/s when using equipment based on NTSC frame rates) frame rate with progressive scanning (not interlaced).
Gradient. 2-satisfiability.
Computational photography. Tikhonov regularization. Bayesian inference. Occam's razor. Geometric albedo. High-definition video. Regularization (mathematics) Inverse problem.