
Vie artificielle Un article de Wikipédia, l'encyclopédie libre. Simulation de vie artificielle d'un véhicule Braitenberg. La vie artificielle est un champ de recherche interdisciplinaire alliant informatique et biologie, mais avec des applications dans des domaines variés tels que l'économie ou l'archéologie. Son objectif est de créer des systèmes artificiels s'inspirant des systèmes vivants, soit sous la forme de programmes informatiques, soit sous la forme de robots. Histoire et origines[modifier | modifier le code] La première manifestation de la vie artificielle date des années 40. Tentatives de définition[modifier | modifier le code] Il est difficile de donner une définition exacte de la vie artificielle. Ainsi, selon Christopher Langton : "La vie artificielle est donc l'étude de systèmes vivants naturels pour en trouver des principes afin de recréer sur des supports artificiels des phénomènes biologiques à partir de rien." Ou encore, selon J. J. Voir aussi[modifier | modifier le code]
Système expert Un article de Wikipédia, l'encyclopédie libre. D'une manière générale, un système expert est un outil capable de reproduire les mécanismes cognitifs d'un expert, dans un domaine particulier. Il s'agit de l'une des voies tentant d'aboutir à l'intelligence artificielle. Plus précisément, un système expert est un logiciel capable de répondre à des questions, en effectuant un raisonnement à partir de faits et de règles connus. Il peut servir notamment comme outil d'aide à la décision. Le premier système expert est DENDRAL. Un système expert se compose de 3 parties : une base de faits,une base de règles etun moteur d'inférence. Le moteur d'inférence est capable d'utiliser faits et règles pour produire de nouveaux faits, jusqu'à parvenir à la réponse à la question experte posée. La plupart des systèmes experts existants reposent sur des mécanismes de logique formelle (logique aristotélicienne) et utilisent le raisonnement déductif. Moteurs d'inférence[modifier | modifier le code]
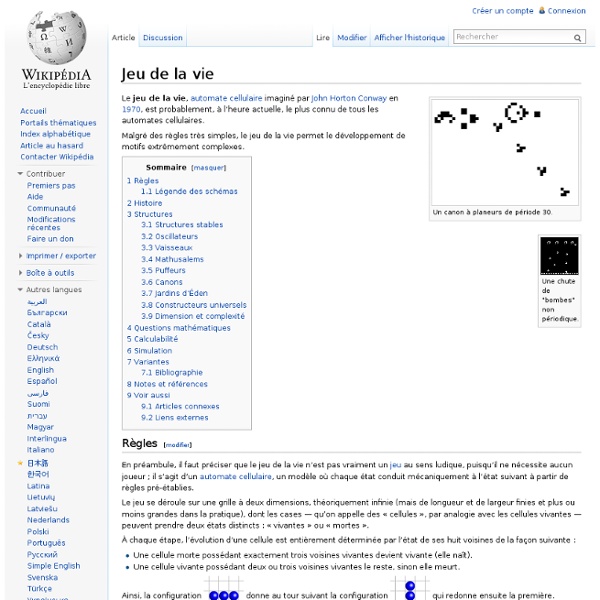
Introduction au Jeu de la Vie Découvrir Dernière mise à jour le 29 décembre 97 Qu'est-ce que c'est ? Où est l'intérêt ? Par où commencer ? Qu'est-ce que c'est ? Sous le nom (un peu pompeux ?) Le jeu de la vie se présente sous la forme d'une tableau dont chaque case peut contenir ou non une cellule. Tout se passe ainsi : à chaque génération l'état de chaque case à la génération suivante est décidé en fonction de son état et du nombre de cellules qui l'entourent : Une cellule vivante ne survivra que si elle a 2 ou 3 voisines précisement (elle ne doit être ni isolée ni étouffée). Voici un exemple : (chaque petit carré représente une cellule vivante) devient puis puis de nouveau et ainsi de suite... Le système est le plus souvent simulé sur un ordinateur et de nombreux logiciels sont disponibles pour cela.Il faut tout de même savoir que dans les premières années du Jeu de la Vie, les simulations informatisées étaient peu courantes et les premiers résultats furent trouvés à la main ! Où est l'intérêt ? Par où commencer ?
Title Scream. Type + Graphic inspiration from 8/16bit games Intelligence ambiante Un article de Wikipédia, l'encyclopédie libre. L'évolution des ordinateurs : la course à la miniaturisation et à la diffusion dans le milieu ambiant L'intelligence ambiante est ce que pourrait devenir l'informatique dans la première moitié du XXIe siècle en repoussant les limites technologiques qu'elle avait à la fin du XXe siècle [réf. nécessaire]. Dans cette approche, le concept même de système d’information ou d'ordinateur change : d’une activité de traitement exclusivement centrée sur l’utilisateur, l'informatique devient interface entre objets communicants et personnes, et entre personnes [réf. nécessaire]. Facteurs en jeu[modifier | modifier le code] L'évolution technologique permet de fabriquer des ordinateurs et composants informatiques minuscules, des capteurs et senseurs qui pourront être omniprésents (nano-informatique) et communiquer entre eux et avec différents réseaux. Vers une informatique diffuse[modifier | modifier le code] Voir aussi[modifier | modifier le code]
Cybernétique, la science des systèmes La cybernétique est une science du contrôle des systèmes, vivants ou non-vivants, fondée en 1948 par le mathématicien américain Norbert Wiener. Notre monde est intégralement constitué de systèmes, vivants ou non-vivants, imbriqués et en interaction. Peuvent ainsi être considérés comme des "systèmes": une société, une économie, un réseau d'ordinateurs, une machine, une entreprise, une cellule, un organisme, un cerveau, un individu, un écosystème… Les ordinateurs et toutes les machines intelligentes que nous connaissons aujourd'hui sont des applications de la cybernétique. La cybernétique a aussi fourni des méthodes puissantes pour le contrôle de deux systèmes importants: la société et l'économie. Un système cybernétique peut être défini comme un ensemble d'éléments en interaction, les interactions entre les éléments peuvent consister en des échanges de matière, d'énergie, ou d'information. Feedback et auto-régulation Les éléments d'un système sont en interaction réciproque. © Syti.net, 1999
Garry au Jeu de Paume | The Culture Deli Avec sa rétrospective sur le photographe américain Garry Winogrand (1928-1984), le musée du Jeu de Paume nous présente l’une des expos les plus attendues de la rentrée. Comme cela fait tout de même beaucoup d’expos qui semblent très attendues en cette rentrée, je suis allée voir tout cela d’un peu plus près… Et le verdict est OUI, cette expo mérite largement un détour de votre auguste personne par le Jardin des Tuileries. En trois arguments massue: – On pense archivu le New-York des années soixante. Pourtant l’artiste nous plonge si délicieusement dans des scènes de la vie new-yorkaise, que l’on en est presque frustré de ne pas les avoir vécu avec lui; – Les clichés ne cherchent pas à orienter notre pensée, bien au contraire ils nous poussent à rêver et à imaginer toute l’histoire : pourquoi cet éclat de rire, pourquoi ces regards ? Conclusion : allez-y !
Atum Moteur d'inférence Un article de Wikipédia, l'encyclopédie libre. Un moteur d'inférence (du verbe « inférer » qui signifie « déduire ») est un logiciel correspondant à un algorithme de simulation des raisonnements déductifs. Un moteur d'inférence permet aux systèmes experts de conduire des raisonnements logiques et de dériver des conclusions à partir d'une base de faits et d'une base de connaissances. Les moteurs d'inférences peuvent implémenter : une logique formelle d'ordre 0 (logique des propositions), d'ordre 0+, d'ordre 1 (logique des prédicats) ou d'ordre 2 avecune gestion d'hypothèses monotone ou non monotone,un chaînage avant, chaînage arrière ou mixte,une complétude déductive ou non. Historique[modifier | modifier le code] Les premiers moteurs d'inférences sont nés dans les années 1960 dans la communauté des chercheurs en informatique, notamment lors du lancement du programme de recherche américain sur le GPS (General Problem Solver). Exemples de moteurs d'inférence[modifier | modifier le code]
Alan Turing : du concept à la machine Alan Turing a contribué à l’informatique à la fois sur un plan conceptuel, avec la fameuse « machine de Turing », puis, quelques années plus tard, en participant concrètement à la réalisation des premiers ordinateurs. Retour sur un itinéraire, de la théorie à la pratique. En 1936, Alan Turing décrit une machine abstraite pour donner un support formel aux notions d’algorithme et de calcul effectif. La machine modèle © A. Rappelons brièvement qu’une machine de Turing est un automate imaginaire muni d’un programme (sous la forme d’une table de transition entre états) et pouvant lire et écrire des caractères sur un ruban de longueur illimitée. Une machine de Turing est un instrument purement conceptuel. La possibilité d'un ordinateur On reconnaît ici l’idée d’un ordinateur universel, apte à exécuter tout programme qu’on lui fournit. Il n’est pas sûr que toutes les implications de ces propriétés aient été perçues à l’époque. Les premiers calculateurs Citons les projets les plus notables : Ace