
Versatile building blocks make structures with surprising mechanical properties. Researchers at MIT’s Center for Bits and Atoms have created tiny building blocks that exhibit a variety of unique mechanical properties, such as the ability to produce a twisting motion when squeezed.

These subunits could potentially be assembled by tiny robots into a nearly limitless variety of objects with built-in functionality, including vehicles, large industrial parts, or specialized robots that can be repeatedly reassembled in different forms. The researchers created four different types of these subunits, called voxels (a 3D variation on the pixels of a 2D image). Each voxel type exhibits special properties not found in typical natural materials, and in combination they can be used to make devices that respond to environmental stimuli in predictable ways. Examples might include airplane wings or turbine blades that respond to changes in air pressure or wind speed by changing their overall shape. Neri oxman and MIT develop digitally produced water-based renewable material. Makerbot's post-processing guides turn 3D prints into advanced prototypes. Marlin Firmware Home Offset Guide Using G-code M206.
This is a guide to using g-code command M206 to set the Z axis home offset in the Marlin Firmware, a guide to a method of adjusting the gap distance between the hot end nozzle and the build platform.
To set the Z axis home offset on the 3d printer, you will use g-code commands including M206 for the home offset, M500 and M501 for the Marlin Firmware EEPROM feature, and G1 for controlled move to Z axis zero position. Set Gap Between Nozzle And Bed Using G-Code, EEPROM & Marlin Firmware About Firstly, this guide may not be suitable for all 3d printers, probably those printers that are the delta type and those with the auto bed levelling feature. Apart from that, for this guide to work for you, you will need a 3d printer configured with a Z+ end stop. On a lot of 3d printer set-ups, the gap between the nozzle tip and the build platform surface is just a fraction of a millimetre, so it does not take much to upset the gap distance. Removed Safeguards – Important. MarlinFirmware/Marlin: Optimized firmware for RepRap 3D printers based on the Arduino platform.
Prusa3D. 布斯特機械: 六軸機械手臂的奇異點. 六軸機械手臂由六組不同位置的馬達驅動,每個馬達都能提供繞一軸向的旋轉運動,其位置可參照下圖。

從自由度(Degree of Freedom)的概念來看,六軸機械手臂已經滿足三維空間中的六個自由度,理論上其末端End-Effector可以到達空間中任何位置及角度,但為什麼有時候機械手臂仍然會卡住呢? 這是因為六軸機械手臂存在著一些奇異點(Singularity)。 Figure: 6-Axis Robot 當機械手臂進行直線運動模式(Linear Mode),系統並未事先計算好過程中的手臂姿態(Configuration),倘若在運動過程中遇到奇異點,會造成機械手臂卡住或跳錯誤,使人相當頭痛;但如果了解奇異點,就能在把普拿疼吃完之前使工作順利地完成了。 機械手臂的奇異點,依發生的原因可概括為兩大類: 內部馬達可運作範圍的極限位置:根據不同型號的機械手臂中使用之馬達,會有不同的運作範圍限制,也就是工作空間(Workspace)的概念,本文不加以贅述。 ====以下簡述奇異點學理上的成因,不想看的話可直接跳到下面的影片==== 運動學上的奇異點解釋. Chair by Lilian van Daal replaces upholstery with 3D-printed structure.
Design graduate Lilian van Daal has developed a conceptual chair influenced by plant cells that could be 3D-printed from a single material (+ slideshow). Van Daal's Biomimicry: 3D-printed soft seat is designed as an alternative to conventional upholstered furniture, which requires several different materials and processes to create the frame, padding and covers. "A lot of materials are used in normal furniture production, including several types of foam, and it's very difficult to recycle because everything is glued together," Van Daal told Dezeen.
The designer began to look at ways of printing structures that behave differently depending on how material is distributed, enabling some sections to be soft and others to be rigid. Emerging Objects. Woodpeckers M2 Box Clamp. Box Clamp. Woodpecker 4" Box Clamp You can never have enough clamps.

But then again, having just the right clamp for the job can make a huge difference. The new Woodpecker 4” Box Clamp might just be the perfect clamp for assembling your cabinets, drawers and virtually any other box made from 1/4” to 1” thick material even with two pieces of different thickness (up to 1/4” difference). Its unique space-saving design actually gives you more surface area then most similar corner clamps while not having any clumsy, protruding handles or screws.
The Box Clamp was designed to take up the least amount of space while offering more, dead-true clamping surface then other comparable clamps. Zh tw. 3D Printing Solutions. 如何在 Grasshopper 編寫網格列印用 G-code 產生器初探(未完) – Generative Product Design. 這篇要講的是如何在 Grasshopper 裡編寫特殊的 G-code 產生程式,可用來讀取曲線或曲面架構並產生可被Reprap列印出來的G-code,其目的並不是要做到一般切片軟體的功能,也不是以實體mesh模型為處理對象。
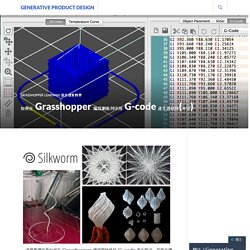
而這給予設計者更大的發揮空間以及對3D列印機更多的運用方式。 上圖是2012年一個 Grasshopper 可以用來產生G-code 的外掛 Silkworm,它可以達到上述讓你自由地把 Grasshopper 或 Rhino裡的物體或線條轉換成 G-code的效果,並透過Reprap的開源3D列印機列印出來,而不需依賴傳統的Slicer軟體來產生 G-code,這也是為什麼設計者可以製作出上圖中這些如同蠶絲般的幾何創作,而一般STL和切片軟體無法產生這樣的G-code檔。 2013年 Silkworm 公開原始碼之後就不再更新了, 請參考連結, 因此許多元件目前因版本太舊而不作用, 但由於現在 GH 提供了許多有助於撰寫 G-code的文字元件而讓我們可以不用借助 Silkworm 就能寫出基本的產生程式。 讀懂G-code 本文適合巳對 Reprap 3D printer、G-code、Slicer軟體運作有概念的讀者,並需安裝或使用過 Slic3r、 Repitier Host 軟體。 G 開頭都是控制移動:如G0, G1, 後面會跟著指定移動速度 F (mm/min)、移動到座標 XYZ, 擠料E的參數,如下圖中列印頭在某個高度移動了兩段距離,那麼該段碼就是 G1 X12.3 Y45.3 E78.9, 但座標和E值都需對照減去前一行來算出實際移動距離和擠出量。 而由句子構成的段落大致可以分成 起始設定、熱身、擠出(佔絕大部分)、收尾 四個段落。 3D列印前準備﹣STL轉檔及使用Netfabb修補STL檔案 – Generative Product Design. 上次提到在進行3D列印前,需要把檔案轉成STL檔,由於轉檔過程會有些許失真,因此在轉檔之後我們需要使用Netfabb軟體對STL模型進行修補,再行列印。
STL及轉檔設定 STL(Stereolithography)是一種積層製造(3D列印)專用的格式,能把原本的曲面或實體模型分解成一層一層斷面形狀的數據,大部分3D建模軟體都有轉出成STL的功能,我們workshop使用的Rhino也能夠轉檔,以下以Mac版的Rhino 及Netfabb做示範。 破面的檢查:在Rhino先對想轉出(export)的物件進行破面的檢查,依據經驗,若物件在Rhino有破面,轉出後也無法列印。