
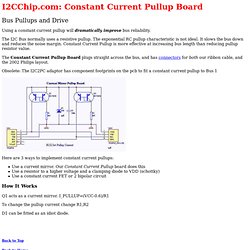
Constant Current Pullup. Bus Pullups and Drive Using a constant current pullup will dramatically improve bus reliability.
Lab 14: Inter-Integrated Circuit (I2C) communication. I2C (Inter-Integrated Circuit) is a short distance serial interface that requires only 2 bus lines for data transfer.

It was invented by Philips in 1980′s, originally to provide easy on-board communications between a CPU and various peripheral chips in a TV set. Today, it is widely used in varieties of embedded systems to connect low speed peripherals (external EEPROMs, digital sensors, LCD drivers, etc) to the main controller. In this experiment, we will cover an overview of I2C protocol, its implementation in PIC microcontrollers, and the method of connecting single and multiple devices on a common I2C bus. We will demonstrate the technique by connecting two I2C EEPROM chips (24LC512) and an I2C compatible temperature sensor (DS1631) with PIC18F2550 microcontroller.
I2C devices with PICMicro Theory. Why pay for Serial LCDs when you can make your own? HD44780 based LCD displays are very popular for embedded projects because they are cheap, easy to interface, can display characters, consume power lot less than seven-segment displays, and most of the present day compilers have in-built library routines for them.
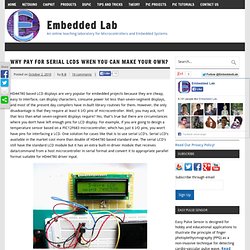
However, the only disadvantage is that they require at least 6 I/O pins of microcontroller. Well, you may ask, isn’t that less than what seven-segment displays require? Yes, that’s true but there are circumstances where you don’t have left enough pins for LCD display. For example, if you are going to design a temperature sensor based on a PIC12F683 microcontroller, which has just 6 I/O pins, you won’t have pins for interfacing a LCD.
One solution for cases like that is to use serial LCD’s.
Siemens SIMATIC Step 7 Programmer's Handbook. €œGreat taste.
Less filling.†When one hears the words “Lite†and software you tend to think of software that’s not really usable. Depending on your needs this may not be the case with the Siemens STEP 7 Lite package. The four major limitations in STEP 7 Lite verses the more advanced STEP 7 package are: If you’re interested in more details then refer to our chart of differences between the Step 7 program packages. On the other hand, the current availability of a free download of the SIMATIC Step 7 Lite software makes it awfully tempting to take a look at it. For a user of the regular STEP 7 software the first thing to notice is there is no SIMATIC Manager. The overall aim of the Lite package was to make the interface easier for new users.
One of the major differences can be seen on the left hand side window. On the right hand side is the old familiar tree structure of commands and blocks. Hacked Gadgets - DIY Tech Blog. Serial Communication Protocols: CAN vs. SPI. By Niall Murphy Distributed systems require protocols for communication between microcontrollers.

Controller Area Networks (CAN) and Serial Peripheral Interfaces (SPI) are two of the most common such protocols. The beauty of using multiple processors in a single system is that the timing requirements of one processor can be divorced from the timing requirements of the other. In a real-time system, this quality can make the programming a lot easier and reduce the potential for race conditions. The price you pay is that you then have to get information from one processor to the other. If you use one fast processor instead of two slow ones, passing information from one part of the software to another may be as simple as passing parameters to a function or storing the data in a global location.
Building protocols.
Programming Tutorials: C++ Made Easy and C Made Easy. Welcome!

If you're new to C++, I recommend you purchase my ebook, Jumping into C++, a complete step-by-step guide for beginners. If you're looking for free tutorials, learn C++ with our C++ tutorial, starting at C++ Made Easy, Lesson 1 (all lessons) If you want to learn C instead, check out our C tutorial C Made Easy, Lesson 1 (all lessons) Want more advanced material on C, C++ graphics, game programming or algorithms?
We've got that too. C++ Tutorial, C++ Made Easy: Learning to Program in C++ Learn C++ with this tutorial, designed for beginners and containing lots of examples, tips and simple explanations.
Market. PLC. Modbus protocol, specifications and in depth tutorial. History of the Modbus protocol Some communication standards just emerge.

Not because they are pushed by a large group of vendors or a special standards organisation. These standards—like the Modbus interface—emerge because they are good, simple to implement and are therefore adapted by many manufacturers. Because of this, Modbus became the first widely accepted fieldbus standard. Modbus has its roots in the late seventies of the previous century. The nice thing of the Modbus standard is the flexibility, but at the same time the easy implementation of it. Modbus message structure The Modbus communication interface is built around messages. On simple interfaces like RS485 or RS232, the Modbus messages are sent in plain form over the network.
Each Modbus message has the same structure. Photonics.com: Optics, Lasers, Imaging & Fiber Information Resource. Electronics Engineering - EEVBlog - Video Blog.