
Fichiers 3D ISO : Mannequin assis - Taille 1,76 m. Servomoteur S4315R. M6405 Chap2 H06. Capteurs-Actionneurs : technologie - Les jauges d'extensométrie. Principe de fonctionnement où R est la résistance électrique r la résistivité du matériau L la longueur du fil s la section du fil En prenant le logarithme népérien et la différentielle de chaque membre et en considérant que les paramètres varient très peu lors de la mesure, on obtient la relation : qui peut se réécrire : où K est appelé le facteur de jauge (environ 2 ).

Les fabricants proposent des jauges de différentes tailles et de différentes formes en fonction des travaux d'analyse de contraintes. Principe de mesure Le montage peut être réalisé avec une seule jauge active (montage dit en quart de pont), deux jauges actives (demi pont) ou encore quatre jauges actives (pont complet). Montage en quart de pont ou en demi-pont[Zoom...] Lorsqu'une jauge est collée sur un substrat déterminé, elle subit des déformations suite à la dilatation propre du matériau due aux effets thermiques. Utilisation Les jauges d'extensométrie peuvent ^étre utilisée comme base pour des capteurs :
RoboMate. Un exosquelette pour faciliter le travail des ouvriers - 16 juin 2015. TMS. 44 millions de travailleurs dans l'UE souffrent de troubles musculo-squelettiques (TMS) liés au travail.

Ces pathologies sont induites par une cadence élevée, une posture prolongée, des charges excessives ou encore des mouvements répétitifs. À ces différentes causes viennent s’ajouter un trop faible temps de récupération, le stress et certains facteurs personnels. Le projet Robo-Mate de l’Union Européenne est conçu pour diminuer la fréquence des TMS car à un exosquelette qui permet de diviser par dix l’effort fait pour soulever ou manipuler des charges lourdes. Le premier prototype à destination de l’industrie Depuis quelques années les exosquelettes sont sortis du champ de la science-fiction. MODULAIRE. Interface 1046 pour 4 capteurs de force.
Interface Phidgets 1046 avec pont de Wheatstone permettant de raccorder jusqu'à 4 capteurs de force non amplifiés tels que capteurs à jauge de compression, accéléromètres, baromètres, etc.

Cette carte est compatible avec les capteurs de force CZL616C, CZL635-5, CZL635-20 et CZL635-50. La carte se raccorde directement sur le port USB (câble inclus). Alimentation: 5 Vcc (via le port USB) Consommation: 500 mA Courant disponible pour les capteurs: 465 mA maxi Taux de rafraîchissement: de 8 ms à 1000 ms Réglage du gain: 1, 8, 16, 32, 64, 128 Dimensions: 48 x 44 x 13 mm. Pj 460. 0900766b8002bcab. Articlemesures 725 jauge deformation. Un exosquelette pour faciliter le travail des ouvriers. Exosquelettes de travail EXHAUSS® : Quelques applications. EXHAUSS - Exosquelette de portage mécanique - Sécurité de la production et de la logistique.
EXHAUSS est lauréate du Prix de l’Innovation en équipement ergonomique de PREVENTICA Lyon 2013 avec le premier exosquelette de portage mécanique au monde, destiné notamment aux opérateurs industriels et BTP d'aujourd'hui : le modèle W “WORKER”.
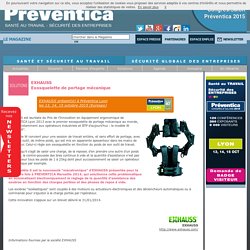
Le modèle W convient pour une session de travail entière, et sans effort de portage, avec le même outil, de même poids, qui est mis en apparente apesanteur dans les mains de l’opérateur. Celui-ci règle son exosquelette en fonction du poids de son outil de travail. Mais lorsqu’il s’agit de saisir une charge, de la reposer, d’en prendre une autre d’un poids différent, la contre-poussée des bras continue à vide et la quantité d’assistance n’est pas ajustée pour tous les poids de 1 à 25kg dont peut successivement se saisir un opérateur en logistique par exemple. Les exobras “isoélastiques” sont couplés à des moteurs ou actuateurs électroniques et des déclencheurs automatiques ou à commande pour s’ajuster à la charge portée par l’opérateur.
EXHAUSS. Un exosquelette imprimé en 3D redonne l'usage de ses bras à une fillette. La petite américaine Emma Lavelle, atteinte d'une grave maladie l'empêchant de bouger ses bras, peut désormais s'en servir comme bon lui semble.

Ce miracle a eu lieu grâce au WREX, un exosquelette fabriqué... par une imprimante 3D. Emma Lavelle est une petite fille américaine qui souffrait depuis sa naissance d'arthrogrypose, une maladie orpheline provoquant des raideurs articulaires qui empêchent le développement des muscles. Grâce à un exosquelette imprimé en 3D, elle vient pourtant de retrouver l'usage de ses bras. À l'âge de 4 ans, elle découvre donc enfin le plaisir de jouer et de se nourrir elle-même.
Lorsqu'elle est sortie du ventre de sa maman, Emma avait en fait les jambes qui lui entourait la tête au niveau des oreilles. La maman d'Emma, Megan Lavelle, a alors assisté à une conférence où était présenté un exosquelette biomécanique, le Wilmington Robotic Exoskeleton (WREX). Or, ce dispositif est formé de pièces de métal trop lourdes et inadaptées à un enfant de l'âge d'Emma.