
Moteurs multicopter en test. Irgendwie stelle ich fest, dass in Foren jeder genau weiß, welches der optimale Motor ist, weil er ihn selber auf seinem Quad fliegt.

Dass er noch nie andere Motoren hatte und ihm daher der Vergleich fehlt, wird dabei weniger beachtet. Mit solchen Behauptungen ohne jegliche Aussagekraft kann ich nichts anfangen, daher habe ich immer wieder andere Motoren gekauft und eine Weile geflogen. Dabei mussten sie alle den harten Alltag erleben, mit Kunstflug und etlichen Abstürzen. Die Motoren in der Leistungsklasse für 8-zöllige Propeller habe ich auf einem Esther-Rahmen mit 40cm Spannweite geflogen, um das Fluggefühl vergleichen zu können.
Natürlich konnte ich auf diese Weise nicht alle Motoren testen. Im Übrigen wurden alle für 3S ausgelegten Motoren mit 3S 2200mAh 40C Lipos geflogen, um ein möglichst konstantes Gewicht (abgesehen vom Motorgewicht und eventuell höherem Gewicht der ESCs) zu gewährleisten. Emax CF2822 1220kv Auch die Lager sind von erschreckend niedriger Qualität. UAV Wiki. Multiwii Avion. How to setup a Multiwii Airplane updated 2014-04-05 Updated to support MWii V2.3 Airplane uses same Hardware as a MultiWii copter.
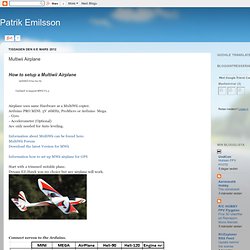
Arduino PRO MINI. 5V 16MHz, ProMicro or Arduino Mega. - Gyro - Accelerometer (Optional) Acc only needed for Auto leveling. Start with a trimmed suitable plane. Dynam EZ-Hawk was my choice but any airplane will work. Connect servos to the Arduino. If you use a Mega Board you need to comment//#define MEGA_HW_PWM_SERVOSOtherwise Servos will be different pins My Installation Sensors work best if mounted as close to CG as possible.I use multiple layers of double-sided foam tape. This picture is old and need to be Updated. Setup Transmitter Set TX channels to full rates it should reach between 1000-2000µs in the Gui.
If you push both sticks in upper right corner all channels should show 2000 in gui. Correct the servo directions in the TX.Same in Mode1 & Mode2. Régulateur PID. Un article de Wikipédia, l'encyclopédie libre.
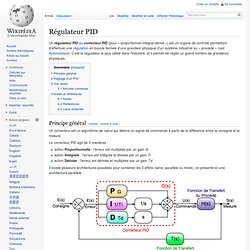
Un régulateur PID ou correcteur PID (pour « proportionnel intégral dérivé ») est un organe de contrôle permettant d’effectuer une régulation en boucle fermée d’une grandeur physique d'un système industriel ou « procédé » (voir Automatique). C’est le régulateur le plus utilisé dans l’industrie, et il permet de régler un grand nombre de grandeurs physiques. Principe général[modifier | modifier le code] Un correcteur est un algorithme de calcul qui délivre un signal de commande à partir de la différence entre la consigne et la mesure. Le correcteur PID agit de 3 manières : action Proportionnelle : l'erreur est multipliée par un gain Gaction Intégrale : l'erreur est intégrée et divisée par un gain Tiaction Dérivée : l'erreur est dérivée et multipliée par un gain Td Il existe plusieurs architectures possibles pour combiner les 3 effets (série, parallèle ou mixte), on présente ici une architecture parallèle : où et dans la formulation précédente) et et. Mwc-fr - Bluetooth.
Je cherchais un moyen permettant de :paramétrer le quad sans avoir à chaque fois d'ouvrir le dôme , connecter la câble série , connecter l'interface, changer les valeurs et redéfaire le tout.récupérer les données pendant les vols de réglages et de tests La solution la plus simple est de remplacer la liaison série filaire par une liaison sans fil.
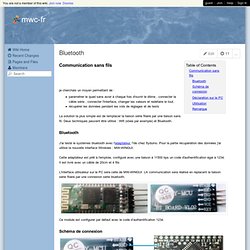
Deux techniques peuvent être utilisé : Wifi (xbee par exemple) et Bluetooth. Bluetooth J'ai testé le systèmes bluetooth avec l'adaptateur de chez flyduino. Pour la partie récupération des données j'ai utilisé la nouvelle interface Windows : MW-WINGUI. Cette adaptateur est prêt à l'emploie, configuré avec une liaison à 11500 bps un code d'authentification égal à 1234. Schéma de connexion Déclaration sur le PC Exemple pour un PC sous windows seven.Lancer le gestionnaire Bluetooth Ajouter un périphérique : l'adaptateur ce présente sous le nom "linvor Bluetooth" association du périphérique avec le code 1234 L'adaptateur a été ajouter. Utilisation Remarque. Optimisations "ultimes" pour MultiWii. MultiWii.
Tout sur le XBEE PRO ! Bonjour,tout d'abord il y a une ptite erreur qui m'a bien fait suer dans le poste initial de notre père Pax A) premier réglage ==Il faudra changer la vitesse qui est par défaut à 9600 Bd pour la passer à 57,600 :aller dans X-CTU avec un module connecté sur Platine USB :dans PC setting : choisir le bon port com virtuel et la vitesse a 57600.Puis dans modem config :cliquer sur "READ" parameters and firmware:vous devez voir apparaitre : XBP24 / XBEE PRO 802.15.4 [..]

Lorsque le Xbee arrive dans vos blanches mains il est de base configuré en 9600 Bauds.Si vous modifiez EN PREMIER la vitesse dans PC setting, il ne pourra pas communiquer avec votre Xbee qui est lui en 9600.et donc vous allez chercher des drivers de partout, des astuces des trucs et des machins et au final... Sinon pour ceux qui sont équipé Xbee, j'ai dégotté des boites en plastique qui font PILE POIL la taille de la platine USB : même pas besoin de colle. le matériel: Lipo battery calculator. Mwc-fr - home.