
: robotic lawn mower. Ambrogio L400 - The automatic lawn mower for large areas. Autonomous Mower Stationary Obstacle Demo. Wireless perimeter - outdoor test (Arduino-DW1000 ultra wideband UWB) My Homemade Robot Arduino Lawnmower. Cagebot the ultimate robot kit. Best Robot Kits for 2019. Mecanum Wheel Robot Kit. Roue vélo avant de 12 à 28 pouces avec axe à boulons ou serrage rapide. La roue de vélo avant idéale pour une pratique urbaine Sachez tout d’abord que les roues type carbone avec une section ultra fine et jante haute, voire pleine, sont généralement destinées aux cyclistes sportifs de haut niveau en recherche de vitesse.

Elles leur assurent légèreté, vélocité et aérodynamisme. Mise en oeuvre de la partie perception d'un robot - Khaled AMOR. ÇáÌãåæÑíÉ ÇáÌÒÇÆÑíÉ ÇáÏíãÞÑÇØíÉ ÇáÔÚÈíÉ æÒÇÑÉ ÇáÊÚáíã ÇáÚÇáí æ ÇáÈÍË ÇáÚáãí ÌÇãÜÚÜÉ ÓÜÚÜÏ ÏÍÜáÜÈ ÇáÜÈÜáÜíÜÏÉ ßÜáÜíÜÉ ÇáÜåÜäÜÏ ÓÜÉ - ÏÇÆÜÑÉ ÇáÅáÜßÜÊÜÑæäíÜß Présenté par: MrMOUALHI YOUNES.

Ce vélo qui vous suit partout est doté d’un véritable cerveau. Des chercheurs chinois ont doté une bicyclette d'une puce révolutionnaire qui fait tourner en parallèle des algorithmes de nature complètement différente.

Résultat, un vélo doué de capacités d'adaptation étonnantes, capable de répondre à des instructions vocales ou de suivre une personne à la trace. En 2016, Google avait dévoilé une vidéo YouTube dans laquelle on pouvait voir un vélo déambuler tout seul dans les rues d'Amsterdam, se relever lorsqu'il tombe, ou emmener des enfants en balade. « Nous avons adapté notre savoir-faire issu de la voiture autonome pour créer ce vélo et nous avons même ajouté de nouvelles fonctions », témoignait un technicien néerlandais de Google.
Devenue virale, la vidéo avait attiré plus de 6 millions de visiteurs en quelques jours. /resources/basics-of-3d-printing/ Beetl Robotics – Cloud Robotics Solutions. 2018 : Ramasseur de balles de ping-pong Didier Petitjean. 2018 : Ramasseur de balles de ping-pong [Vous êtes ici ] ==> Accueil > STI2D > Projet SIN > 2018 : Ramasseur de balles de ping-pong 1er résultat pour les OSI 2018 Problématique :
Roue complète balai ramasseur TURFMASTER XBISW380LT. Couple, puissance, vitesse... Page préparée par Didier, sous l'oeil vigilant de Cyber Papy!

Introduction Couple, puissance, vitesse..., quelle relation entre ces critères, quel lien avec la physique du véhicule et de l'environnement dans lequel il se meuh, hem, meut?. Nota: Toutes les unités sont exprimées dans le système SI. Calculer le couple minimale nécessaire - pour que le robot à 6 MCCs puisse monter une marche par Galilé.
Bonjour, Je suis en train de construire un robot très semblable à celui-ci ; qui permet de monter des marches.
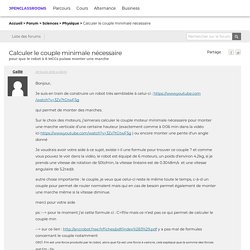
Sur le choix des moteurs, j'aimerais calculer le couple moteur minimale nécessaire pour monter une marche verticale d'une certaine hauteur (exactement comme à 0:06 min dans la vidéo ici ) ou encore monter une pente d'un angle donné. Calcul couple moteur pas à pas. Index(3) Calcul de la puissance mécanique d'un moteur pas à pas. Salut, dans le cadre d’un projet je dois acheter un moteur pas à pas.

J’aimerais calculer sa puissance pour pouvoir ensuite dimensionner la taille des poulies du projet.J’essaye de calculer la puissance de ce moteur pas à pas : Comprendre et bien utiliser le driver A4988 pour moteurs pas à pas. - Devenez pro en électronique. On retrouve beaucoup d’applications utilisant les moteurs « pas à pas » ou plus communément en anglais les « Stepper motor ».

Je citerai bien sûr les imprimantes 3D bien connues à l’heure actuelle, mais il est bien évident qu’il existe une multitude d’applications pour ces moteurs. Le but de cet article n’est pas de passer en revue toutes les applications et technologies du marché, mais de parcourir ensemble les 80% des notions essentielles sur l’utilisation pertinente du célèbre driver A4988 et son homologue le DRV8825 et de vous partager les mesures que j’ai pu réaliser à l’oscilloscope et constatations que j’ai pu observer.
Voici ma toute nouvelle vidéo qui aborde toute la partie réglage du driver. Gamme de moteurs Pas à Pas nema 23 de 0.55 à 3Nm. A4988, un breakout pour commander des moteurs pas-à-pas... même en microstepping. Nous sommes content d'offrir un excellent produit, efficace, compatible avec les breadboard et cartes de prototypage.

Le meilleur c'est qu'il est simplissime d'utilisation avec un Arduino (et même un Raspberry Pi) et dispose d'une documentation complète en Français Ce module n'a rien à envier à EasyDriver Présentation. Request a Metal 3D Printed Sample Part. Calcul de la Puissance et du couple. La puissance d'une machine tournante procure un couple.
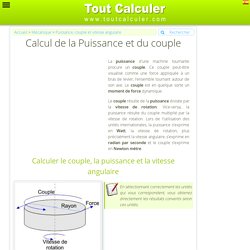
Ce couple peut-être visualisé comme une force appliquée à un bras de levier, l'ensemble tournant autour de son axe. Le couple est en quelque sorte un moment de force dynamique. Comment calculer le couple necessaire d'un moteur pas a pas - Practical astronomy - Astrosurf. Fait une mesure de couple en N @ 50 cm de l'axe du scope quand il est à l'horizontale, divise la par 2 pour obtenir le couple en Nm. Tu: couple utileTu(m)= couple utile en sortie moteur.T: coupleRr: rapport de reduction 50(?) x25=1250nr: rendement reducteur (ce n'est pas un "n", la lette existe pas sur le clavier), environ 80%, en prendra 0.8ensuite tu prend ce couple "T" et tu fait ca:Tu(m)= T / Rr / nrsoit pour T= 10NmTu(m)= Tu / Rr / nrTu(m)= 10 / 1250 / 0.8 = 0.01 Nm.
Arduino Project-Self Balancing Robot. Flying a drone with React and Node.js, pt. 1 – IBM Developer. (1) Another Arduino project - Your Arduino Balancing Robot (YABR) - Part 1. Robotique. 24 Juin 2019 PyRobot est un framework et un écosystème qui permet aux chercheurs et aux étudiants en intelligence artificielle de se familiariser avec un robot en quelques heures à peine, sans connaissances... 03 Mai 2019 Provenant de l’incubateur de l’École Polytechnique, la start-up Mainbot se donne pour mission de préparer les enfants de 5 à 12 ans au monde de demain en leur enseignant la robotique et la...
Contact - Herr-robot - Pick the Golf balls on the driving range. Golf ball collector. (1) INH Enterprise, LLC. Farmbot, l’ouvrier-robot. Construire son kit robotique et le personnaliser à souhait, c’est ce que permet l’open source. La rédaction d’Industrie & Technologies a réalisé pour vous une sélection de 5 plateformes robotiques ouvertes pouvant répondre à tous vos besoins. Parmi elles, le robot Farmbot développé par Rory Aronson, ingénieur américain. Destiné à la fois à la recherche mais également aux particuliers et petits agriculteurs, le robot ouvrier open source Farmbot a été mis au point par l’ingénieur américain Rory Aronson en 2013.
NOVA, robot open source compatible Arduino. Robots crowdfunding Aujourd'hui je lance une nouvelle catégorie du blog, les campagnes de financement participatives autour de la robotique. Quoi de mieux pour se tenir au courant des nouveaux robots présentés en France et à l'étranger que de suivre de près les différentes campagnes de crowdfunding autour de la robotique.
Un bon moyen de savoir ce qui marche, ce qui ne marche pas et ce qui convainc ou non le grand public. La premier projet présenté dans cette rubrique a dépassé ses espérances et récolté plus d'argent que prévu, un bon signe pour la suite. NOVA, robot avec intelligence artificielle. (1) 2 Robot Ball Collector (Tennis & Golf) Invention Ideas. (1) Herrobot - the autonomous golf ball collector. One, un robot accessible pour les makers basé sur l'open source - Niryo. [Mise à jour] Vous pouvez maintenant commander Niryo One ! Les informations présentées dans cet article ne sont pas à jour. Vous pouvez en savoir plus sur les évolutions du robot en lisant en lisant cet article et celui-ci. [/Mise à jour] Vous voulez apprendre, ou utiliser la robotique dans votre vie quotidienne, mais les robots que vous trouvez sont trop chers ? Vous aimez les technologies open source ? TOP 10 des robots imprimés en 3D.