
Festo Corporate - Bionic Learning Network. Highlight of the Bionic Learning Network 2014: the BionicKangaroo Learning from nature: in the Bionic Learning Network, a cooperation between Festo and renowned universities, institutes and development companies, principles from nature provide inspiration for technical applications and industrial practice.

Energy-efficient jumping based on a natural model Like its natural model, the BionicKangaroo can recover the energy exerted on landing, store it and efficiently use it for the next jump. Everything about the BionicKangaroo Collision-free flying of autonomous systems With the eMotionSpheres, Festo shows how several flying objects can move – individually or collectively – in a coordinated manner and within a defined space. All you need to know about the eMotionSpheres Variable gripping based on the human hand.
CmapTools - Publications. This reference list is a collection of resources concerning concept maps and related representations.

The list is by no means complete, as research on concept maps and their applications is ongoing in many areas. The papers presented at the First International Conference on Concept Mapping (CMC 2004) which took place on September 2004 in Pamplona, Spain, are available at CMC's Program Webpage. Abstracts, when available in the reference list, are from ERIC (Educational Resources Information Center), and some of the articles can be ordered from ERIC at Abrams, R. (2000). Meaningful learning: A collaborative literature review of concept mapping, Meaningful Learning Research Group, California Consortium for Teacher Development, University of California, Santa Cruz, CA. CmapTools - Publications. CmapTools - Publications. CmapTools - Support to the Concept Mapping Community. CmapTools - Documentation. The CmapTools documentation is organized as a Knowledge Model composed of concept maps and associated resources, constructed with CmapTools itself.

The following is a categorized list of the Cmaps in the Knowledge Model, for direct access. Series Elastic Actuators. Here you can find CAD files, assembly instructions, assembly videos, specs, etc. for fabricating linear Series Elastic Actuator SEA23-23.

Feel free to use the files for non commercial purposes and low volume commercial purposes, but note that neither IHMC nor Yobotics, Inc. provides any warranty, guarantee, or liability of anysort whatsoever. The files are AS-IS and will require someone skilled in the art of mechatronics and robotics to derive any value from them. If you are interested in using the actuators for high volume commercial purposes, please contact us. If you do use these files, please cite the following papers in your publications that benefit from the actuators: Simulation Construction Set Software. Yobotics! Simulation Construction Set. The Yobotics Simulation Construction Set is a full-featured software package for easily and quickly creating simulations of robots, biomechanical systems, and mechanical devices.
Boston Dynamics: Dedicated to the Science and Art of How Things Move. Learning Locomotion. Learning Locomotion Software. Body Localized Motion Capture: One improvement made on the motion capture data is the addition of Locap, which uses only the top six motion capture points on the dog to determine body position and orientation.

Currently the motion capture determines body pose using all of the mocap points, making the position susceptible to the flakier leg mocap points. The top six points are seen by more cameras and therefore generally more reliable, yielding a better measure of body pose. Learning Locomotion Full Description. Detailed Description of Our Technical Approach The highlights of our approach include the selection of salient state and action spaces, joint-trajectory free stance control, and effective teaching.

New Approaches to the Modeling and Control of Complex Dynamics. Biologically-Inspired Locomotion. Biologically-Inspired Locomotion. Biologically-Inspired Locomotion. Note: We are not currently looking to hire, but see our hiring notice from time to time for more information.
At IHMC we are developing humanoid robots for operations in urban environments. Robot dog prepares for world domination « How-To News. Robot dog prepares for world domination What is in store for the future?

Flying cars? Maybe. Dinner in a pill? Perhaps. MAKE @ Robogames. 4volt Jansen Walker Beta 1. Projects / Jansen Walker Robot. An openly designed Creative Commons licensed robot.
. * Piston-powered mech leg. Robot pet. Image:Dog Leg.gif - BEAM Robotics Wiki. Robotics/Types of Robots/Walkers. “In the early days of air travel, detractors used to argue that, if God had meant us to fly, he would have given us wings.
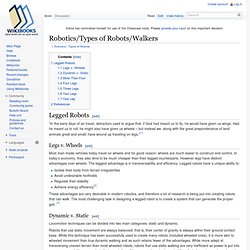
Had he meant us to roll, he might also have given us wheels – but instead we, along with the great preponderance of land animals great and small, have wound up traveling on legs.”[1] Legs v. Wheels[edit] Most man-made vehicles today travel on wheels and for good reason: wheels are much easier to construct and control. In today’s economy, they also tend to be much cheaper than their legged counterparts. Isolate their body from terrain irregularitiesAvoid undesirable footholdsRegulate their stabilityAchieve energy efficiency[2] These advantages are very desirable in modern robotics, and therefore a lot of research is being put into creating robots that can walk.
Dynamic v. Locomotion techniques can be divided into two main categories: static and dynamic. Dynamic walking is characterized in that the robot is not always in balance. More Than Four[edit] Robotics Bible – Robotics Projects, News, Videos, and more. Robotics Bible – Robotics Projects, News, Videos, and more. CmapTools - Download CmapTools. Biologically-Inspired Robotics. Festo Robots. Guide to Servos. Servos are the key mechanical component of walking robots, at least the ones most hobbyists build.
The capabilities and requirements of your servos will dictate your design and performance of your walking robot so it is good to understand them as well as possible. Contents How a Servo Works A servo is a motor a geared electric motor with a feedback circuit built in so that you can set it to a position, usually at a particular angle. Servos are shaped like a rectangular box because there is a motor inside -- oddly on the side opposite the gear head-- and then on the other side a potentiometer connected to the output shaft. Big Dog Walking 4-Legged Tank/Mule.