
James Hasik: Questions about robotic CONOPS posed by the Terramax experiments. As long as I've been talking trucks the past week, I thought that I should comment on one of Oshkosh's ongoing projects—its Terramax autonomous driving technology—and what its recent trials mean for concepts of operations (CONOPS) with military robotics.

Actually, I'm driven tto comment because the implications seem rather more far-ranging than one might guess at first glance. Marcus Weisgerber of Defense News last week covered some of Oshkosh's work with the US Marine Corps at three locations in the US, in limited trials involving no more than two unmanned pickup trucks paired with a single manned control vehicle. The ultimate idea, though is more ambitious: to remove most of the drivers from road convoys, because Marines (and others) get killed from time-to-time on those missions, just hauling food and fuel and ammunition up from Karachi to the Afghan hinterland.
That definitely didn't sound good. The point is that any one of these ideas and more might apply to truck convoys. James Hasik: Questions about robotic CONOPS posed by the Terramax experiments. C.ymcdn.com/sites/www.masstlc.org/resource/resmgr/files/presenters_online_booklet. Www.inl.gov/technicalpublications/documents/3772066.pdf. Disaster Robotics - Robin R. Murphy. Www.manhvuonviet.net/wp-content/uploads/2014/02/KhuyenTran-RescueRobotSwarm1.pdf. Hose. Valve. Wall. Figure 6 shows the course layout for the Wall task.

The robot will use a cordless drill to cut through wall boards to remove a prescribed triangular shape. The Wall task will be scored as follows: (1) Cut one edge between two green vertices (1 point), (2) Cut a second edge (1 point), and (3) Cut a third edge and remove triangular piece from wall (1 point). The wall material will be ½ inch thick drywall. There will be no obstruction or supports directly behind the cut pattern. A single right triangle will be drawn on the wall as the shape to cut. The task is to cut exclusively within the area colored green or blue to remove the red area, while not cutting into the area outside the area colored green, that is, not cutting any gray area. Door. Figure 5 shows the course layout for the Door task.

The robot begins to the left of the diagram and proceeds to the right. The start line appears green in the figure. The Door task consists of three sub-tasks: (1) Enter push door (1 point), (2) Enter pull door (1 point), and (3) enter pull door with weighted closer (1 point). These sub-tasks must be completed in the given order. For each of the three sub-tasks, completion requires the robot to first open the door and then travel through the open doorway and cross a line on the floor on the far side of the door.
Debris. Figure 4 shows the course layout for the Debris task.

The robot begins behind the start line, so that the debris lies directly between the start point and the doorway. In Figure 4 the start line appears green, with a “tick mark” at the center (directly under the overhead truss). The Debris task consists of three sub-tasks: (1) Remove five pieces of debris (1 point), (2) Remove an additional five pieces of debris (1 point), and (3) Travel through the open doorway (1 point). Ladder. Terrain. Figure 2 shows the planned course layout for the Terrain task.
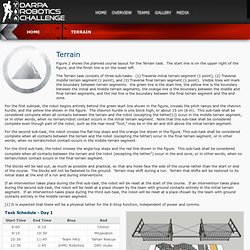
The start line is on the upper right of the figure, and the finish line is on the lower left. The Terrain task consists of three sub-tasks: (1) Traverse initial terrain segment (1 point), (2) Traverse middle terrain segment (1 point), and (3) Traverse final terrain segment (1 point). Vehicle. Www.theroboticschallenge.org/dashboard/scoreboard/DRCTrialsScoresAnalysisAnonymousv11DISTAR22423.pdf. Team THOR. Virginia Tech is developing THOR, a Tactical Hazardous Operations Robot, which will be state-of-the-art, light, agile and resilient with perception, planning and human interface technology that infers a human operator’s intent, allowing seamless, intuitive control across the autonomy spectrum.

The team will emphasize three essential themes in developing THOR: hardware resilience, robust autonomy and intuitive operation. RoMeLa at Virginia Tech has a history of developing successful award-wining humanoid robotic platforms including CHARLI (Cognitive Humanoid Robot with Learning Intelligence,) DARwIn (Dynamic Anthropomorphic Robot with Intelligence,) SAFFiR (Shipboard Autonomous Fire Fighting Robot) to name a few. RoMeLa’s years of experience and expertise in humanoid robot platform development, mechanical design, system integration brings a new and exciting humanoid platform THOR for the DRC. Developing a Robot for DRC: Virginia Tech takes on Department of Defense challenge to build disaster-response robots. A 3-D rendering of the Robotics and Mechanisms Laboratory's latest robot, THOR.

BLACKSBURG, Va., Oct. 24, 2012 – Virginia Tech’s Robotics and Mechanisms Laboratory is leading an international team of academic and private corporate robotics experts in developing humanoid robots designed for intense disaster relief as part of a new U.S. Department of Defense-sponsored Robotics Challenge that lab founder/director Dennis Hong calls the “greatest challenge of my career.” The task is massive: The adult-sized robot must be designed to enter a vehicle, drive it, and then exit the vehicle, walk over rubble, clear objects blocking a door, open the door, and enter a building. The robot then must visually and audibly locate and shut off a leaking valve, connect a hose or connector, climb an industrial ladder and traverse an industrial walkway. The final and possibly most difficult task: Use a power tool and break through a concrete wall. An SSVEP based BCI to control a humanoid robot by using portable EEG device.
An adaptive brain-computer interface for humanoid robot control. Www-hcr.ijs.si/resources/papers/ar07b.pdf. Www.ais.uni-bonn.de/nimbro/papers/darh05_behnke_mueller_schreiber.pdf. Www.cs.csubak.edu/~wli/Wei_Li_Pub/Cerebot_752-024_2011.pdf. Homes.cs.washington.edu/~rao/jne_humanoid_08.pdf. Conf.uni-obuda.hu/SAMI2005/Sincak.pdf. Humanoid Robots Working for Science: State-of-the-Art Research on Interactive Intelligent Systems at the HANNOVER MESSE 2011. With the two research institutes CoR-Lab and CITEC, Bielefeld University exhibit at the HANNOVER MESSE from 4 to 8 April 2011.

The exhibition is located on the OstWestfalenLippe stand in Hall 16, Stand A 04. In recognition of France as this year's Partner Country of the HANNOVER MESSE, Bielefeld's scientists are exhibiting the EU project HUMAVIPS "Humanoids with auditory and visual abilities in populated spaces" under the motto "Science to business". Yesterday, on the opening day of the HANNOVER MESSE, they held a joint press conference with the project's industrial partner, Aldebaran Robotics from France: Aldebaran Robotics Launches Educational Partnership with the Bielefeld University In the evening the Minister of Ministry for Economy, Energy, Building, Housing and Transport of the State North-Rhine-Westphalia, Harry K.
Guppy.mpe.nus.edu.sg/~mpeccm/papers/hnicem1.pdf. Humanoid Robotics. Www.ais.uni-bonn.de/papers/KI08_Behnke.pdf. Www1.cs.columbia.edu/~allen/F12/challenges_future.pdf. Www1.cs.columbia.edu/~allen/F12/challenges_future.pdf. Human–robot interaction. Human–robot interaction is the study of interactions between humans and robots.
It is often referred as HRI by researchers. Human–robot interaction is a multidisciplinary field with contributions from human–computer interaction, artificial intelligence, robotics, natural language understanding, design, and social sciences. Origins[edit] Human–robot interaction has been a topic of both science fiction and academic speculation even before any robots existed. Because HRI depends on a knowledge of (sometimes natural) human communication, many aspects of HRI are continuations of human communications topics that are much older than robotics per se.
The origin of HRI as a discrete problem was stated by 20th-century author Isaac Asimov in 1941, in his novel I, Robot. These three laws of robotics determine the idea of safe interaction. Many in the field of HRI study how humans collaborate and interact and use those studies to motivate how robots should interact with humans. Search and rescue[edit]
Humanoid robotics projects. Various global humanoid projects, which have provided further advancement to the area of humanoid robotics, are listed in these pages.

A humanoid robot is a robot with its overall appearance based on that of the human body, allowing interaction with made-for-human tools or environments. Generally humanoid robots have a torso with a head, two arms and two legs, although some forms of humanoid robots may model only part of the body, for example, from the waist up. Some humanoid robots may also have a 'face', with 'eyes' and 'mouth'. Androids are humanoid robots built to aesthetically resemble a human. Various humanoid robotic projects from around the world have focused on and developed areas such as cognitive learning and improved autonomy, and this area of robotics is continuing to develop at a rapid pace. Start Your Mad Science: DARPA's Humanoid Robot Challenge.
DARPA's latest challenge kicked off yesterday at the agency's conference center in Arlington, Va. The Pentagon research division wants semiautonomous robots that can perform human chores such as driving vehicles, letting themselves into buildings, and repairing equipment, with the stated purpose of creating bots that could help in disaster-response efforts. Inspiration for the DARPA Robotics Challenge, or DRC, comes in part from the Fukushima nuclear power plant disaster following the tsunami of March 2011, program manager Gill Pratt says. "During the first 24 hours there were several opportunities for intervention to help make the disaster less severe," Pratt tells PM, "but unfortunately people could not go into that zone because the radiation was too high...
So DARPA's question with the DRC is ‘What advances in robotic technology can be made to improve our collective resilience during the first few days of a disaster? ' "