
Самодельные шестерни. - Колёса - Механика - Полезные статьи+схемы - RoboHome. Я хочу попробовать свои силы в изготовлении шестеренок.

Точнее не изготовление, а копирование. Принцип таков: 1. Из гончарной глины лепим небольшой блин толщиной чуть большей, чем толщина требуемой шестерни. 2. Шестеренка-образец впечатывается в блин и вынимается. В блину остается форма, копирующая образец. 3. Всего 4 этапа и примерно 30 минут времени... Для работы потребуются следующие ингредиенты: 1. 2. Вычерчивание профиля зубца - Техническое черчение. Эвольвентный профиль зубца.

Построение эвольвенты в общем виде было рассмотрено в главе „Геометрическое черчение". Рассмотрим практическое применение этой кривой при вычерчивании профиля зубцов зубчатых колёс. Пусть даны два цилиндрических зубчатых колеса с модулем m=18 и числом зубцов: первого z1 = 18, второго z2 = 12. Для вычерчивания профиля зубцов пользуемся ранее приведёнными формулами. Находим размеры элементов зубцов. Gear generator. This free online gear template generator is designed for making scale accurate paper gear templates which you can glue onto wood and then cut out with a bandsaw.
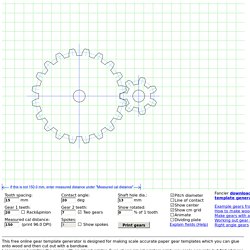
I recommend printing the gears with an ink jet printer. Even cheap ink jet printers print very scale accurate but Not all laser printers are accurate. How to make wooden gears. This page also available in Spanish Some people are intimidated at the prospect of making their own wooden gears for the screw advance box joint jig. So I figured I'd cover the topic of gear making in a bit more detail. Gear Formulae.
Простейший механизм. Таблица простейших механизмов, из Циклопедии[1], 1728 год.
Простейшие механизмы являются "букварём" для понимания более сложных механизмов. Простейшие механизмы — устройства, служащие для преобразования силы. Представляют собой элементы более сложных механизмов. Спусковой механизм часов. Простейший спусковой механизм часов. Гиря или пружина вращает шестерню, и она с помощью механизма спуска толкает маятник то в одну, то в другую сторону. Спусковой механизм часов (на языке часовщиков: спуск, ход) (фр. échappement, англ. escapement, фр. hemmung) — в механических часах: устройство, которое преобразует непрерывное вращательное движение в колебательное или возвратно-поступательное движение. Это устройство обеспечивает равномерное расходование энергии, запасённой в пружине или гире. Игрушки с двигателями. Игрушки с двигателями — игрушки, снабжённые двигателями различных типов.
Двигатели (заводные механизмы) повышают игровые свойства и занимательность игрушек. Основными типами двигателей для игрушек являются: 1) резиномоторы, 2) пружинные заводные по типу часовых механизмов и 3) электрические. Такие двигатели, как паровые, водяные, ветряные и реактивные, применяются в игрушках очень редко. Некоторое распространение получили двигатели внутреннего сгорания в виде микролитражных моторов для авиамоделей. Механизм. Механи́зм (греч. μηχανή mechané — машина) — внутреннее устройство машины, прибора, аппарата, приводящее их в действие. [1] Механизмы служат для передачи движения и преобразования энергии (редуктор, насос, электрический двигатель).
Как преобразователь движения механизм видоизменяет скорости или траектории (или же и то, и другое). Он преобразует скорости, если при известной скорости одной из его частей другая его часть совершает движение, подобное движению первой, но с другой скоростью. Механизм преобразует траекторию, если, в то время как одна из его точек описывает известную траекторию, другая описывает другую заданную траекторию. Linkage Mechanisms. Мгновенный центр скоростей. Положение мгновенного центра скоростей[править | править исходный текст] Рис. 1.
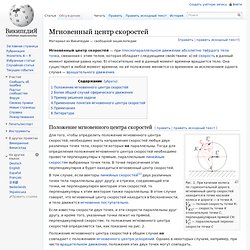
При качении колеса по горизонтальной дороге мгновенный центр скоростей находится в точке касания колеса и дороги — в точке А. Механизмы П. Л. Чебышева. Этюды : Математические этюды. Механизм Чебышева. Механизм Чебышёва — механизм, преобразующий вращательное движение в движение, приближённое к прямолинейному.
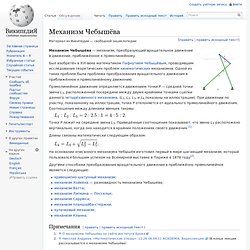
Был изобретён в XIX веке математиком Пафнутием Чебышёвым, проводившим исследования теоретических проблем кинематических механизмов. Одной из таких проблем была проблема преобразования вращательного движения в приближённое к прямолинейному движению. Прямолинейное движение определяется движением точки P — средней точки звена L3, расположенной посередине между двумя крайними точками сцепки данного четырёхзвенного механизма. (L1, L2, L3, и L4 показаны на иллюстрации). При движении по участку, показанному на иллюстрации, точка Р отклоняется от идеального прямолинейного движения.
Механизм Ватта. Механизм Уатта (механизм Ватта, параллелограмм Ватта) изобретён Джеймсом Уаттом (19 января 1736 — 25 августа 1819) для придания поршню паровой машины прямолинейного движения.

Этот механизм не создаёт абсолютно прямолинейного движения, и сам Уатт не стремился добиться этого. История[править | править исходный текст] Идея использования связей содержалась в письме Ватта к Мэтью Болтону в июне 1784 года. Рисунок диаграммы Джеймса Ватта, письмо к сыну (1808) Механизм Липкина — Посселье. Механизм Липкина-Посселье: звенья, показанные одним цветом, имеют одинаковую длину Механизм Липкина — Посселье (англ.
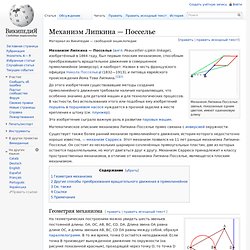
Peaucellier–Lipkin linkage), изобретённый в 1864 году, был первым плоским механизмом, способным преобразовывать вращательное движение в совершенное прямолинейное (инверсор), и наоборот. Назван в честь французского офицера Никола Посселье (1832—1913), и литовца еврейского происхождения Йома Това Липкина.[1][2] До этого изобретения существовавшие методы создания прямолинейного движения требовали наличия направляющих, что особенно значимо для деталей машин и для технологических процессов. В частности, без использования этого или подобных ему изобретений поршень в поршневом насосе нуждается в прочной заделке в месте крепления к штоку (см. плунжер).
Это изобретение сыграло важную роль в развитии паровых машин. Четырёхзвенный механизм. Четырёхзвенный механизм — это самый простой кинематически замкнутый механизм, звенья которого способны двигаться друг относительно друга. Этот механизм состоит из четырёх звеньев, каждое из которых соединено подвижными соединениями с двумя другими. Типы[править | править исходный текст] Плоский[править | править исходный текст] Одно из звеньев обычно постоянно остаётся неподвижным (такое звено называется стойкой, основанием или рамой), так что для определения положения всех звеньев, как правило, требуется определить положение только одного из них. Те два звена, которые шарнирно соединены с основанием, называются основными звеньями. То из основных звеньев, к которому приложена внешнее силовое воздействие, называется ведущим звеном (если оно по отношению к стойке способно совершать полный оборот, то его именуют[1] кривошипом). Механизм Хойкена. Механизм Хойкена (англ.
Механизм Кланна. Механизм Кланна (англ. Klann linkage) — это плоский механизм, имитирующий походку животных и способный служить в качестве замены колесу. Механизм состоит из вращающегося звена, кривошипа, двух шатунов и двух сцепок. JANSEN - KLANN LINKAGE COMPARISON. Jansen Linkage - Klann Linkage Comparison The proportions used in the animation for the Klann linkage are from a project from the summer of 2008. A few other configurations are posted on the Concept Page. Klann Linkage in Phun. Theo Jansen style robot leg: prototypes #4 and #5. Скачковый механизм. Четырёхпазовый мальтийский крест наиболее распространён в киноаппаратуре Классификация[править | править исходный текст] Существует несколько типов скачковых механизмов: грейферный, мальтийский, кулачковый, пальцевый и «улитка».
В киноаппаратуре наибольшее распространение получили скачковые механизмы двух типов: мальтийский механизм, использующий зубчатый скачковый барабан, и грейферный механизм, использующий лентопротяжный зуб или зубья, приводимые в движение специальным механизмом, например кулачковым или кривошипным[1]. Особенно критично светопропускание в кинопроекторах, главной характеристикой которых считается световой поток, попадающий на экран. Однако, чрезмерное уменьшение рабочего угла может привести к большим ускорениям при работе механизма и, как следствие, износу киноплёнки. Кулачковый механизм. Кулак с толкателем (кулачковый механизм) Мальтийский механизм. Механизм Саррюса. Шотландский механизм. Кривошипно-шатунный механизм. Механизм планшайба-стержни. Анимированное изображение планшайбы с валом и стержнями. Вращающийся вал и диск показаны серебристым цветом.
Невращающийся диск показан золотистым цветом и шесть стержней приводятся от него в возвратно-поступательное движение. Стержни могут быть присоединены к плунжерам или поршням и вставлены в цилиндры. Механическая передача. Планетарная передача. Механический редуктор. Волновая передача. Зубчатая передача. Зубчатое колесо. Эвольвентное зацепление. Окружность. Скорость. Кинематическая пара. Степени свободы (механика) Траектория. Момент силы. Заводной пружинный двигатель - Патент СССР 01.01.1955. Ремонт часов своими руками. Пособие для начинающего мастера. Clockwork. Pullback motor. How to Make Springs.
Wind Up Mechanics: How To Make a Wind-Up Toy Yourself. Наручные часы с боковой секундной стрелкой. Пружинный двигатель. Ювелирные технологии.