
Control.Pid. Introducción a la lógica difusa. Siguiente:Introducción Introducción a la lógica difusa Guillermo Morales-LunaCentro de Investigación y Estudios Avanzados del IPN(CINVESTAV-IPN)gmorales@cs.cinvestav.mx Este artículo está disponible en versión en PDF y en PostScript comprimido.
Resumen: Hacemos una presentación elemental de la lógica difusa. Valfaro02B. Red neuronal artificial. Red neuronal artificial perceptrón multicapa con n neuronas de entrada, m neuronas en su capa oculta y una neurona de escape.
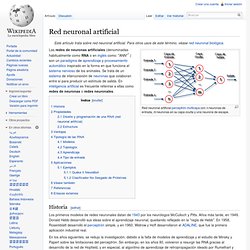
Las redes de neuronas artificiales (denominadas habitualmente como RNA o en inglés como: "ANN"[1] ) son un paradigma de aprendizaje y procesamiento automático inspirado en la forma en que funciona el sistema nervioso de los animales. Se trata de un sistema de interconexión de neuronas que colaboran entre sí para producir un estímulo de salida. En inteligencia artificial es frecuente referirse a ellas como redes de neuronas o redes neuronales. Historia[editar] Los primeros modelos de redes neuronales datan de 1943 por los neurólogos McCulloch y Pitts. En los años siguientes, se redujo la investigación, debido a la falta de modelos de aprendizaje y el estudio de Minsky y Papert sobre las limitaciones del perceptrón. Propiedades[editar] Perceptrón con 2 entradas. Una red neuronal se compone de unidades llamadas neuronas.
Estructura[editar] Ventajas[editar] Modelos[editar] Perceptrón. Control_Avanzado. Con-8. Proporcional integral derivativo. Un PID es un mecanismo de control por realimentación que calcula la desviación o error entre un valor medido y el valor que se quiere obtener, para aplicar una acción correctora que ajuste el proceso.
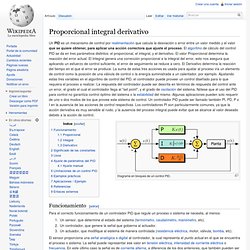
El algoritmo de cálculo del control PID se da en tres parámetros distintos: el proporcional, el integral, y el derivativo. El valor Proporcional determina la reacción del error actual. El Integral genera una corrección proporcional a la integral del error, esto nos asegura que aplicando un esfuerzo de control suficiente, el error de seguimiento se reduce a cero. El Derivativo determina la reacción del tiempo en el que el error se produce. La suma de estas tres acciones es usada para ajustar al proceso vía un elemento de control como la posición de una válvula de control o la energía suministrada a un calentador, por ejemplo. Diagrama en bloques de un control PID. Funcionamiento[editar] El controlador lee una señal externa que representa el valor que se desea alcanzar. Proporcional[editar] Introducci n. Que es una Red Neuronal Artificial.
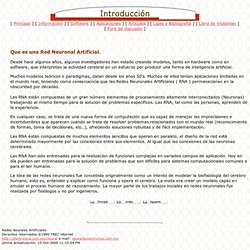
Desde hace algunos años, algunos investigadores han estado creando modelos, tanto en hardware como en software, que interpretan la actividad cerebral en un esfuerzo por producir una forma de inteligencia artificial. Muchos modelos teóricos o paradigmas, datan desde los años 50's. Muchos de ellos tenían aplicaciones limitadas en el mundo real, teniendo como consecuencia que las Redes Neuronales Artificiales ( RNA ) permanecieran en la obscuridad por décadas. Las RNA están compuestas de un gran número elementos de procesamiento altamente interconectados (Neuronas) trabajando al mismo tiempo para la solución de problemas específicos.
Las RNA, tal como las personas, aprenden de la experiencia. Las RNA están compuestas de muchos elementos sencillos que operan en paralelo, el diseño de la red está determinado mayormente por las conexiones entre sus elementos.