
Modélisme/Modèles/Multicoptères/Electronique/Crius AIO/Calibration des contrôleurs - Ordinoscope.net. De Ordinoscope.net.
Lorsqu'on arme la carte multiwii, les 4 moteurs doivent démarrer simultanément, et à la même vitesse. Si ce n'est pas le cas (ex. moteur(s) arrêté(s)), il est alors nécessaire de calibrer les contrôleurs. Cette opération ne peut être réalisée que si vous avez le code source configuré avec vous. Si vous utilisez une platine préinstallée, et ne voulez pas utiliser le code source, vous devrez exécuter l'opération manuellement sur chacun des moteur, avec la télécommande. Toutefois, les débattements de la télécommande ne correspondent pas à ceux de la multiwii, et cela peut provoquer des surprises.
Attention: cette opération est très dangereuse. Procédure: enlever les accus brancher l'USB éditer le fichier config.h et activer "#define ESC_CALIB_CANNOT_FLY" #define ESC_CALIB_CANNOT_FLY compiler et télécharger le firmware à la fin du téléchargement, la multiwii redémarre avec les moteurs à fond. Tutorial Configuration de la GUI Multiwiiconf. Réglage et optimisation des P.I.D. Flip MWC Flight Controller 1.5. MultiWii. Montage et configuration d’un quadcopter MultiWii (lite) « Robson. Il y a quelques semaines, je me suis mis en tête d'acheter un Quadcopter en kit, histoire de changer un peu de tous ces avions J'ai mis plusieurs jours à le monter et je me suis pas mal embêté à le régler.
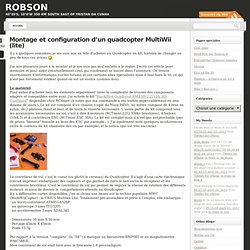
J'écris cet article pour mémoire et pour aider éventuellement ceux qui voudraient se lancer dans l'aventure. On trouve énormément d'informations sur les forums et sur certains sites spécialisés mais il faut faire le tri, ce qui n'est pas forcément évident quand on est un novice (comme moi). Le matériel Pour éviter d'acheter tous les éléments séparément (avec la complexité de trouver des composants adaptés et compatibles entre eux), j'ai acheté le kit "Black/Red Quadrotor RM450V2 2212&30A Combined" disponible chez RCtimer (A noter que ma commande a été traitée impeccablement en une dizaine de jours.). Le kit est composé d'un chassis (copie du Naza F450), lui même composé de 4 bras en nylon, de 2 platines (haut et bas) et de toute la visserie nécessaire. Config.h - MultiWii.
Explain what is in this file and what is in eeprom The config.h file How it works The first configuration of MultiWii is done in the config.h file of the firmware source.
With a programming IDE like Arduino or a simple text editor, you can change several options for your multicopter, flying wing or helicopter. This is done by adding or removing of the // in front of the #define parameters which comment or uncomment the line so it is included or not in the final firmware. For instance, in the config file you choose the type of multicopter, minimum throttle for motors, i2c speed, internal pullup resistors (if needed), controller board with at least gyroscope, remove the // in front of the #define and you have the simplest configuration to fly in ACRO mode. #define QUADX #define MINTHROTTLE 1180 #define I2C_SPEED 400000L #define CRIUS_SE Basic Setup Here we will present some of the more usual configurations used in the config.h to help the beginners with their first configuration. Tuto : Multiwii pas de panique. Dernièrement, je me suis lancé dans la fabrication d’un quadricoptère, je fus confronté comme beaucoup au choix de ma carte de bord, pour moi ce fût une Multiwii lite de chez HK : Multiwiilitev.1.0 Mais bien d’autres cartes existent, plus ou moins compactes, plus ou moins chères.

Les avantages des cartes Multiwii sont les fonctions qu’elles proposent, c’est des cartes très complètes, elles sont livrées prêtes à être installées, pas besoin de rajouter de gyromètre ou d’accéléromètre, c’est inclus ! Il n’y a qu’à transférer votre programme sur la carte. Le seul défaut, c’est qu’a l’arrivée de sa carte, on est un peu perdu, c’est pourquoi j’ai crée de tutoriel.