
Build and Drive This Adorable FPV Balance Bot. When you’re getting started in robotics, building a self-balancing bot is a rite of passage.

Mine is called EddiePlus. He’s rechargeable, Wi-Fi-enabled, and remote controlled, and he’s an open source project, so anyone can build him in a weekend or two. He can even be navigated completely out of sight, for 1 hour of drive time, via an FPV (first-person view) camera. I built my first Eddie just for fun and as an excuse to put my Intel Edison Compute Module to good use. As a customer eagerly awaiting the Edison release, I was excited to have a project planned before my order arrived. A blast from the past: I was 10 years old back in the early 90’s. Now Eddie is back and he’s excited to show off his improvements. Eddie has Windows, iOS, and Python apps you can use to command him via Wi-Fi. Let’s build him! 1. Figure A Notice the arrow that I drew on the motor? Note: Be sure to install the encoders nice and flush with the bottom of the motor. 2. Figure B 3. Figure C Figure D 4. Figure E Figure F.
Build an Off-Road Raspberry Pi Robot: Part 2. In the previous article, I showed how to do the initial build of our Mantis robot, featuring a RoboClaw motor controller board and a Raspberry Pi.
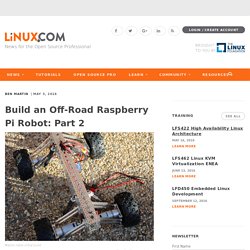
Here, I’ll move on to attaching motors, connecting the RoboClaw to your Pi through a USB port, and supplying the RoboClaw with its own power source. Complete Motor guide for Robotics - All. The home of Scrum > Home. Build an Adorable Wobble Bot from Upcycled Cans. 7 Tutorials To Start Working With Kinect and Arduino. Sometimes is hard to find what you need especially when you’re interested to build a robot based on Kinect sensor.

In this article, we explore seven best tutorials from where you can learn how to interface the Arduino board with the Kinect 3D sensor in order to control a car, a helicopter, or actuators. Doc Center. Here you can explore the Open Source Parts Library, make your own designs of Multiplo-compatible parts, and join to a growing community of users and developers: Multiplo Design Kit clic here to download Assembly Guides: N8.Octogonal.Assembly.en.20120831 N8.ThreeWheeled.Assembly.en.20120831.

Technotrix: HOW TO MAKE A SELF BALANCING ELECTRIC SKATEBOARD (WITH INSTRUCTABLE)? What is it?
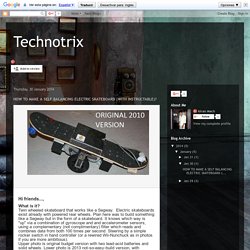
Twin wheeled skateboard that works like a Segway. Electric skateboards exist already with powered rear wheels.
Triangle Amateur Robotics. Building a robot arm. Introduction This article shows how to build your own robot arm constructed mainly from 2mm aluminium.
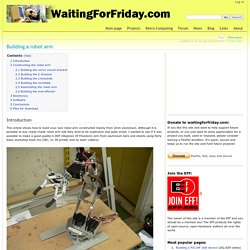
Although it is possible to buy ready-made robot arm kits they tend to be expensive and quite small; I wanted to see if it was possible to make a good quality 6 DOF (Degrees Of Freedom) arm from aluminium bars and sheets using fairly basic workshop tools (no CNC, no 3D printer and no laser cutters). The mechanical design of the arm is based around 2 universal bracket designs along with a number of smaller brackets. The pivoting parts are made from standard hobby servos and small flanged bearings in order to keep the design as simple as possible. In order to help show the construction of the arm in as much detail as possible each part is covered by a separate section below.
All of the parts were designed in libreCAD (an open-source 2D CAD package) so you are welcome to install the CAD and reuse the plans which can be downloaded below. Building an Arduino Robot, Part III: Assembling the Robot. Welcome to the third article in the tutorial series in which I'm building a remote controlled Arduino based vehicle robot.
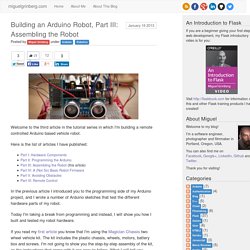
Here is the list of articles I have published: In the previous article I introduced you to the programming side of my Arduino project, and I wrote a number of Arduino sketches that test the different hardware parts of my robot. Today I'm taking a break from programming and instead, I will show you how I built and tested my robot hardware. The manufacturer suggests attaching the battery box to the lower platform, but that would require unscrewing the top platform to change the batteries. To avoid that hassle, I have attached the box to the top platform. Tetrix Scooter - LabVIEW for Lego MINDSTORMS Projects.
By: Katrina Miaoulis and Karl Wendt Tufts University Center for Engineering Education and Outreach Introduction In this lesson will learn how to use a single Tetrix kit to build a powered electric scooter that can move you around a room*.
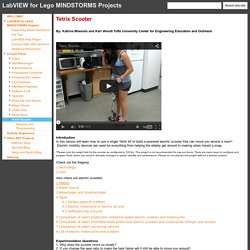
Electric mobility devices are used for everything from helping the elderly get around to making urban transit a snap. *Please note the weight limit for the scooter as configured is 100 lbs. Actobotics. Actobotics is a robotics building system based around extruded aluminum channels, gears, precision shafts, and ball bearings.
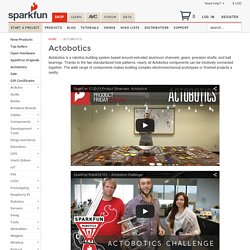
Thanks to the two standardized hole patterns, nearly all Actobotics components can be intuitively connected together. The wide range of components makes building complex electromechanical prototypes or finished projects a reality. Products Mounts & Hubs These parts let you support moving components, interface various structural components, and are the basic building blocks to connecting all Actobotics products together. Structural Structural parts will provide you with a strong framework for your project. Battles of the Bots: Hands-on STEM is the Newest School Sport! Part hackathon, part sporting event, and all STEM!

Move over football. Robots are turning STEM into the ultimate school sport. Robotics competitions for students aren’t new, but they are going mainstream and growing by leaps and bounds. With institutions, corporations and even Grammy Award-winning music producers like will.i.am backing these competitions, there’s more opportunity than ever for teachers to get students excited about what will surely be a dominant field in the coming years. If there is any doubt about the popularity of robotics in STEM education, this infographic by KUKA Robotics (@kuka_roboticsus) should silence the naysayers:
FRC. WRO. Ev3. LeJOS. Resources: Physical Computing. Challenges. FLL & NXT. GoGo Board. Awesome Robots. Vex. Forums & Blogs. Purchasing. Bot Bench — Xander. FTC - First Tech Challenge.