
Linear dynamical system Linear dynamical systems are dynamical systems whose evaluation functions are linear. While dynamical systems in general do not have closed-form solutions, linear dynamical systems can be solved exactly, and they have a rich set of mathematical properties. Linear systems can also be used to understand the qualitative behavior of general dynamical systems, by calculating the equilibrium points of the system and approximating it as a linear system around each such point. Introduction[edit] In a linear dynamical system, the variation of a state vector (an -dimensional vector denoted ) equals a constant matrix (denoted ) multiplied by varies continuously with time or as a mapping, in which varies in discrete steps These equations are linear in the following sense: if and are two valid solutions, then so is any linear combination of the two solutions, e.g., where need not be symmetric. Solution of linear dynamical systems[edit] If the initial vector is aligned with a right eigenvector If ) of the matrix .
Scalar field theory In theoretical physics, scalar field theory can refer to a classical or quantum theory of scalar fields. A field which is invariant under any Lorentz transformation is called a "scalar", in contrast to a vector or tensor field. The quanta of the quantized scalar field are spin-zero particles, and as such are bosons. The only fundamental scalar field that has been observed in nature is the Higgs field. , has a particularly simple form: it is diagonal, and here we use the + − − − sign convention. Classical scalar field theory[edit] Linear (free) theory[edit] where is known as a Lagrangian density, dD-1 ≝ dx⋅dy⋅dz ≝ dx1⋅dx2⋅dx3 for the three spatial coordinates, is the Kronecker delta function and where for the ρ-th coordinate xρ . . is sometimes known as a mass term, due to its interpretation in the quantized version of this theory in terms of particle mass. The equation of motion for this theory is obtained by extremizing the action above. is the Laplace operator. The n! . , of to be satisfies .
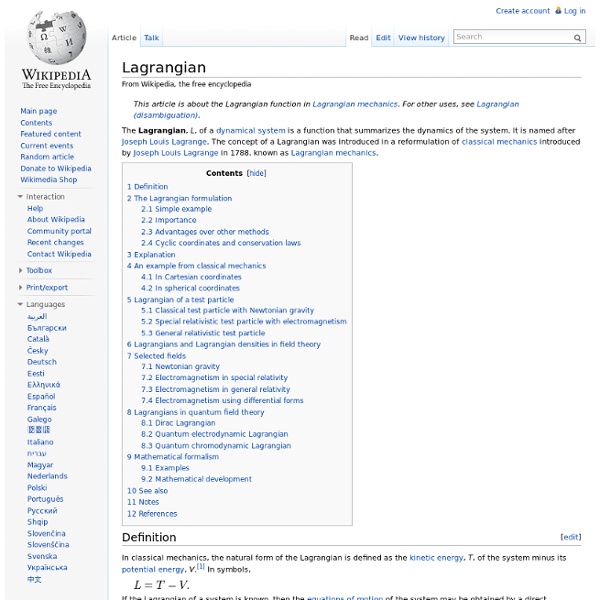
Lagrangian mechanics Lagrangian mechanics is a re-formulation of classical mechanics using the principle of stationary action (also called the principle of least action).[1] Lagrangian mechanics applies to systems whether or not they conserve energy or momentum, and it provides conditions under which energy, momentum or both are conserved.[2] It was introduced by the Italian-French mathematician Joseph-Louis Lagrange in 1788. The use of generalized coordinates may considerably simplify a system's analysis. For example, consider a small frictionless bead traveling in a groove. If one is tracking the bead as a particle, calculation of the motion of the bead using Newtonian mechanics would require solving for the time-varying constraint force required to keep the bead in the groove. Conceptual framework[edit] Generalized coordinates[edit] Illustration of a generalized coordinateq for one degree of freedom, of a particle moving in a complicated path. Concepts and terminology[edit] . Mathematical formulation[edit]
Limit-cycle Behavior in a nonlinear system In mathematics, in the study of dynamical systems with two-dimensional phase space, a limit cycle is a closed trajectory in phase space having the property that at least one other trajectory spirals into it either as time approaches infinity or as time approaches negative infinity. Such behavior is exhibited in some nonlinear systems. Limit cycles have been used to model the behavior of many real-world oscillatory systems. The study of limit cycles was initiated by Henri Poincaré (1854–1912). We consider a two-dimensional dynamical system of the form where is a smooth function. with values in which satisfies this differential equation. such that for all . By the Jordan curve theorem, every closed trajectory divides the plane into two regions, the interior and the exterior of the curve. Given a limit cycle and a trajectory in its interior that approaches the limit cycle for time approaching . , and also for trajectories in the exterior approaching the limit cycle.
Chiral symmetry breaking In particle physics, chiral symmetry breaking is an example of spontaneous symmetry breaking affecting the chiral symmetry of a gauge theory such as Quantum Chromodynamics, the quantum field theory of the strong interactions. The principal and manifest consequence of this symmetry breaking is the generation of 99% of the mass of nucleons, and hence the bulk of all visible matter, out of very light quarks.[1] For example, for the proton, of mass mp= 938 MeV, the bound quarks, with mu ≈ 2 MeV , md ≈ 5 MeV, only contribute about 9 MeV to its mass, the bulk of it arising out of QCD chiral symmetry breaking, instead.[2] Yoichiro Nambu was awarded the 2008 Nobel prize in physics for his understanding of this phenomenon. The origin of the symmetry breaking may be described as an analog to magnetization, the fermion condensate (vacuum condensate of bilinear expressions involving the quarks in the QCD vacuum), formed through nonperturbative action of QCD gluons, with v ≈ −(250 MeV)3. .
Liénard–Wiechert potential These expressions were developed in part by Alfred-Marie Liénard in 1898 and independently by Emil Wiechert in 1900[1] and continued into the early 1900s. Implications[edit] The study of classical electrodynamics was instrumental in Einstein's development of the theory of relativity. Analysis of the motion and propagation of electromagnetic waves led to the special relativity description of space and time. The Liénard–Wiechert formulation is an important launchpad into more complex analysis of relativistic moving particles. The Liénard–Wiechert description is accurate for a large, independent moving particle, but breaks down at the quantum level. Quantum mechanics sets important constraints on the ability of a particle to emit radiation. Universal Speed Limit[edit] The force on a particle at a given location r and time t depends in a complicated way on the position of the source particles at an earlier time tr due to the finite speed, c, at which electromagnetic information travels. where .
Dynamical system The Lorenz attractor arises in the study of the Lorenz Oscillator, a dynamical system. Overview[edit] Before the advent of computers, finding an orbit required sophisticated mathematical techniques and could be accomplished only for a small class of dynamical systems. Numerical methods implemented on electronic computing machines have simplified the task of determining the orbits of a dynamical system. For simple dynamical systems, knowing the trajectory is often sufficient, but most dynamical systems are too complicated to be understood in terms of individual trajectories. The systems studied may only be known approximately—the parameters of the system may not be known precisely or terms may be missing from the equations. History[edit] Many people regard Henri Poincaré as the founder of dynamical systems.[3] Poincaré published two now classical monographs, "New Methods of Celestial Mechanics" (1892–1899) and "Lectures on Celestial Mechanics" (1905–1910). Basic definitions[edit] Flows[edit]
Interpretations of quantum mechanics An interpretation of quantum mechanics is a set of statements which attempt to explain how quantum mechanics informs our understanding of nature. Although quantum mechanics has held up to rigorous and thorough experimental testing, many of these experiments are open to different interpretations. There exist a number of contending schools of thought, differing over whether quantum mechanics can be understood to be deterministic, which elements of quantum mechanics can be considered "real", and other matters. This question is of special interest to philosophers of physics, as physicists continue to show a strong interest in the subject. They usually consider an interpretation of quantum mechanics as an interpretation of the mathematical formalism of quantum mechanics, specifying the physical meaning of the mathematical entities of the theory. History of interpretations[edit] Main quantum mechanics interpreters Nature of interpretation[edit] Two qualities vary among interpretations:
Lagrange-Formalismus Für Systeme mit einem generalisierten Potential und holonomen Zwangsbedingungen lautet die Lagrange-Funktion wobei die kinetische Energie und die potentielle Energie des betrachteten Systems bezeichnen. Man unterscheidet sogenannte Lagrange-Gleichungen erster und zweiter Art. Im engeren Sinn versteht man unter dem Lagrange-Formalismus und den Lagrange-Gleichungen aber die zweiter Art, die häufig einfach als Lagrange-Gleichungen bezeichnet werden: Dabei sind generalisierte Koordinaten und deren Zeitableitungen. Lagrange-Gleichungen erster und zweiter Art[Bearbeiten] Mit den Lagrange-Gleichungen erster Art lassen sich die Zwangskräfte explizit ausrechnen. Punktteilchen im mit den Ortsvektoren , deren Koordinaten durch voneinander unabhängige (holonome) Zwangsbedingungen der Form mit eingeschränkt sind (wobei eine explizite Zeitabhängigkeit zugelassen wurde). -dimensionale Mannigfaltigkeit eingeschränkt ( ist die Anzahl der Freiheitsgrade). Die Zwangskräfte dargestellt werden: Die sind die Massen der . also
Orbit (dynamics) For discrete-time dynamical systems the orbits are sequences, for real dynamical systems the orbits are curves and for holomorphic dynamical systems the orbits are Riemann surfaces. Diagram showing the periodic orbit of a mass-spring system in simple harmonic motion. (Here the velocity and position axes have been reversed from the standard convention in order to align the two diagrams) Given a dynamical system (T, M, Φ) with T a group, M a set and Φ the evolution function where we define then the set is called orbit through x. for every point x on the orbit. Given a real dynamical system (R, M, Φ), I(x)) is an open interval in the real numbers, that is . is called positive semi-orbit through x and is called negative semi-orbit through x. For discrete time dynamical system : forward orbit of x is a set : backward orbit of x is a set : and orbit of x is a set : where : Usually different notation is used : is written as where is in the above notation. acting on a probability space is a lattice inside
Glueball In particle physics, a glueball is a hypothetical composite particle.[1] It consists solely of gluon particles, without valence quarks. Such a state is possible because gluons carry color charge and experience the strong interaction. Glueballs are extremely difficult to identify in particle accelerators, because they mix with ordinary meson states.[2] Theoretical calculations show that glueballs should exist at energy ranges accessible with current collider technology. However, due to the aforementioned difficulty (among others), they have (as of 2013[update]) so far not been observed and identified with certainty.[3] The prediction that glueballs exist is one of the most important predictions of the Standard Model of Particle Physics that has not yet been confirmed experimentally.[4] Properties of glueballs[edit] Constituent Particles and Color Charge[edit] Total Angular Momentum[edit] Fundamental particles with J=0 or J=2 are easily distinguished from glueballs. Electric Charge[edit]
Invarianz Invarianz ist die Unveränderlichkeit von Größen. Das zugehörige Adjektiv lautet invariant. Der Begriff wird in folgenden Wissenschaften verwendet: Als Invariante wird die Größe selbst bezeichnet, die unverändert bleibt: Siehe auch: List of chaotic maps List of chaotic maps[edit] List of fractals[edit] Wick rotation In physics, Wick rotation, named after Gian-Carlo Wick, is a method of finding a solution to a mathematical problem in Minkowski space from a solution to a related problem in Euclidean space by means of a transformation that substitutes an imaginary-number variable for a real-number variable. This transformation is also used to find solutions to problems in quantum mechanics and other areas. Overview[edit] Wick rotation is motivated by the observation that the Minkowski metric [with (−1, +1, +1, +1) convention for the metric tensor] and the four-dimensional Euclidean metric are equivalent if one permits the coordinate t to take on imaginary values. , sometimes yields a problem in real Euclidean coordinates x, y, z, which is easier to solve. Statistical and quantum mechanics[edit] Wick rotation connects statistical mechanics to quantum mechanics by replacing inverse temperature with imaginary time . . is , where is Boltzmann's constant. is, up to a normalizing constant, under a Hamiltonian . where