Kolmogorov Complexity – A Primer
The Complexity of Things Previously on this blog (quite a while ago), we’ve investigated some simple ideas of using randomness in artistic design (psychedelic art, and earlier randomized css designs), and measuring the complexity of such constructions. Here we intend to give a more thorough and rigorous introduction to the study of the complexity of strings. This naturally falls into the realm of computability theory and complexity theory, and so we refer the novice reader to our other primers on the subject (Determinism and Finite Automata, Turing Machines, and Complexity Classes; but Turing machines will be the most critical to this discussion). The Problem with Randomness What we would really love to do is be able to look at a string of binary digits and decide how “random” it is.
Monism
Monism is the philosophical view that a variety of existing things can be explained in terms of a single reality or substance. The wide definition states that all existing things go back to a source which is distinct from them (e.g. in Neoplatonism everything is derived from The One). A commonly-used, restricted definition of monism asserts the presence of a unifying substance or essence. One must distinguish "stuff monism" from "thing monism".[3] According to stuff monism there is only one kind of stuff (e.g. matter or mind), although there may be many things made out of this stuff. According to thing-monism there exists strictly speaking only a single thing (e.g. the universe), which can only be artificially and arbitrarily divided into many things. The term monism originated from Western philosophy,[4] and has often been applied to various religions.
The Phenomenon of Man
The Phenomenon of Man (Le phénomène humain, 1955) is a book written by the French philosopher, paleontologist and Jesuit priest Pierre Teilhard de Chardin. In this work, Teilhard describes evolution as a process that leads to increasing complexity, culminating in the unification of consciousness. The book was finished in the 1930s, but was published posthumously in 1955. The Roman Catholic Church initially prohibited the publication of some of Teilhard’s writings on the grounds that they contradicted orthodoxy. The foreword to the book was written by one of the key scientific advocates for natural selection and evolution of the 20th century, and a co-developer of the modern synthesis in biology, Julian Huxley. Summary[edit]
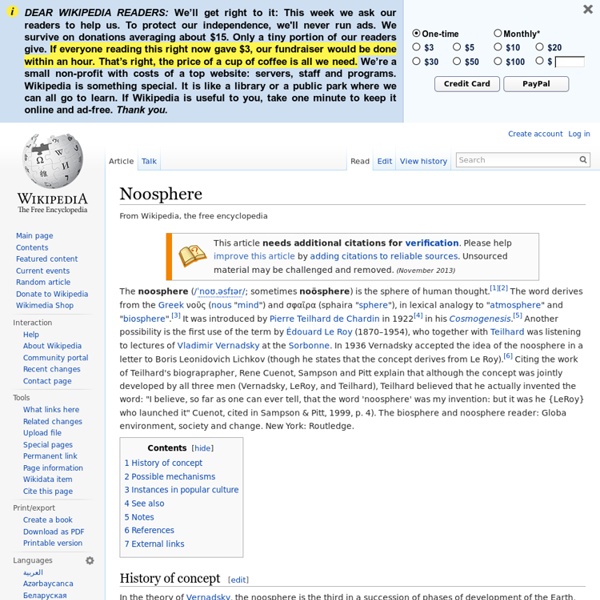
Comparison between Karl Pribram's "Holographic Brain Theory" and ore conventional models of neuronal computation
One of the problems facing neural science is how to explain evidence that local lesions in the brain do not selectively impair one or another memory trace. Note that in a hologram, restrictive damage does not disrupt the stored information because it has become distributed. The information has become blurred over the entire extent of the holographic film, but in a precise fashion that it can be deblurred by performing the inverse procedure. This paper will discuss in detail the concept of a holograph and the evidence Karl Pribram uses to support the idea that the brain implements holonomic transformations that distribute episodic information over regions of the brain (and later "refocuses" them into a form in which we re-member). Particular emphasis will be placed on the visual system since its the best characterized in the neurosciences.
Integral (spirituality)
Integral thought is claimed to provide "a new understanding of how evolution affects the development of consciousness and culture."[3] It includes areas such as business, education, medicine, spirituality, sports,[14] psychology and psychotherapy.[15] The idea of the evolution of consciousness has also become a central theme in much of integral theory.[16] According to the Integral Transformative Practice website, integral means "dealing with the body, mind, heart, and soul
Synarchism and Rule by Secret Societies, page 1
Partly this is to fit the pronouncements of the American psychic Edgar Cayce (1877-1945), who said that the Sphinx and Pyramids were built by survivors from Atlantis in 10500 BC. But it also fits the view of history used to justify another, very specific - and in our view very alarming - form of occult philosophy. To understand this we have to go back to 19th century France, and a political-occult ideology called Synarchy.
Timeline of Western philosophers
A wide-ranging list of philosophers from the Western traditions of philosophy. Included are not only philosophers (Socrates, Plato), but also those who have had a marked importance upon the philosophy of the day. The list stops at the year 1950, after which philosophers fall into the category of Contemporary philosophy. Western and Middle Eastern philosophers[edit] Classical philosophers[edit]
Symbiosis
In a symbiotic mutualistic relationship, the clownfish feeds on small invertebrates that otherwise have potential to harm the sea anemone, and the fecal matter from the clownfish provides nutrients to the sea anemone. The clownfish is additionally protected from predators by the anemone's stinging cells, to which the clownfish is immune. Symbiosis (from Ancient Greek σύν "together" and βίωσις "living")[1] is close and often long-term interaction between two or more different biological species. In 1877, Albert Bernhard Frank used the word symbiosis (which previously had been used to depict people living together in community) to describe the mutualistic relationship in lichens.[2] In 1879, the German mycologist Heinrich Anton de Bary defined it as "the living together of unlike organisms.