
SPEEDY-BL brushless controller Peter Rother 4.09.2001 translation Max Zuijdendorp Nov 2001 There is only one ESC that I considered for my beautiful motor: the SPEEDY-BL designed by Jo Aichinger, available from the Megra company as a kit. In the meantime I know the circuit by heart. The improvements will keep coming and are immediately available to all. With the many measurements I had to make I fitted a connector in the 5 holes underneath IC1 which supplies my DataLogger with the following data: These data were converted with a 14-bit AD converter and written in Flash memory or fed to a PC. Soldering I do not want to discourage anybody, but for the first excursion into SMD assembly you should look for something else. Then you should abide by the very well done step-by-step instructions. Despite all that I used a full eleven hours to build the first SPEEDY-BL, although I am pretty experienced in this type of work, and had planned on only 4-5 hours. Conclusion: Controller functioning at full load
Dossier quadrirotors#tm_liens#tm_liens#tm_liens#tm_liens Préambule : Ce texte est tout public, mais contient des références au modélisme. Des connaissances de base en modélisme sont donc nécessaires. La théorie Un quadrirotor est un appareil volant comportant 4 rotors pour sa sustentation. La montée et la descente s'obtiennent en changeant le régime moteur sur les quatre hélices. Le roulis et le tangage s'obtiennent en augmentant la vitesse d'une hélice, tout en diminuant la vitesse de l'autre hélice du même couple. De part sa nature, l'appareil est totalement instable : autant essayer de faire tenir une assiette ( sans la faire tourner ) au bout d'un manche à balai... Conception à partir de zéro Plusieurs écoles d'ingénieurs se sont intéressées au quadrirotor pour développer des projets d'étude. Il existe aussi un forum spécialisé dans la conception et la réalisation de quadrirotors :xbird.fr. Un exemple de réalisation se trouve ici : le Gorrazoptère Les différents modèles commerciaux. l'UFO 4 de Walkera le Draganflyer V TI On la trouve pour 800$
Welcome to Bergen R/C - /Multi Bergen R/C Multirotors Now available as a Quad, Hexa, and Octocopter, these machines are prebuilt and test flown and include OS 30 Brushless Motors, 13X6.5 APC props, 60 amp Opto-isolated ESC's, and the Wookong M autopilot from DJI Innovations. They also include as standard, a 2 axis camera mount (Pitch and roll) that can be stabilized by the Wookong M in a Quad or Hexa (the Octo uses the 2 additional ports for the 2 extra legs), but a NAZA Flight controller can be added to stabilize the mount in an Octo. This Camera mount is sized to accept most full size DSLR cameras, such as the Canon 5D of Nikon D7000. We are now offering a folding Hexacopter, making transportation much easier in a standard vehicle.
PLATYPUS fr/Mikrokopter-Montage Voir aussi: fr/MK-Hexa, fr/MK-Okto, fr/Mikrokopter-Debuter Ce guide doit être mis à jour. Certaines photos ne correspondent plus tout à fait aux kits de base actuels. Les principes fondamentaux du montage des MK restent valablesIci (en anglais) la page de garde du montage de chacun des modèles en vente: en/assemblyOverview Notice de montage de l'OktoKopter Notice de montage de l'HexaKopter Comment transformer un tas de pièces détachées en un Mikrokopter, et qui vole en plus ? Cliquer sur les photos pour les agrandir. MikroKopter Avant / Après Une petite vidéo sur la procédure de montage incluant le premier vol (en allemand) La contribution ci-dessous se réfère aux kit complets et/ou aux plaques équipées fini disponibles sur MK-Shop•de. Le châssis est la structure de base du Mikrokopter. Il doit répondre aux caractéristiques suivantes : Rigide et solide Léger Personnalisable suivant les goût de chacun Voici un châssis de Mikrokopter standard avec un espacement des axes moteurs de 40cm.
Quad Copters | DJI Quadcopter Phantom | Phantom Quad Copter RTF The DJI Quadcopter Phantom is perhaps the most technologically advanced quadcopter with first person view that the world has yet to see. Whether you simply want to watch it fly or take first person view video, you will find this new high tech quad copter very easy to operate and enjoy. Red Rocket Hobbies is an Authorized DJI Direct Dealer! One thing to consider when making your purchase is that the DJI Phantom is a highly complex flying machine. You may find yourself needing help after you get your Phantom at some point! Have a look at some of the amazing features: As advanced as it is, and loaded with high tech features, the DJI Phantom Quad Copter RTF is still unbelievably easy to fly and great for beginners. Still have questions about the DJI Quadcopter Phantom? Psst... did you know Red Rocket Hobbies carries Go Pro Hero 3 Cameras and some amazing carry cases for the Phantom? Attractive and Portable! Ready To Fly Now! Transmitter Is Included - Just add (4) AA Batteries Night Flight?
One Finger Can Say a Thousand Words Cut in front of someone and say thank you with a warm Fuck You! Nice! Using electroluminescent technology, combined with animation, This Remote Controlled Hand will create a attention grabbing sensation wherever it is used! More info: "The Hand" R/C Window Sign - Don’t buy anything if it costs more than a buck! Unmanned Aerial Vehicle La conception du châssis du Sphéniscoptère doit satisfaire plusieurs critères : Etre le plus léger possible Supporter les vibrations des quatre moteurs et les contraintes de vol Embarquer et protéger l'électronique et les accumulateurs Supporter, orienter et protéger la caméra Servir de support d'atterrissage Plusieurs études ont donc été nécessaires afin d'obtenir un châssis optimal. Chaque composant ou pièces mécaniques ont été pesés. La durée de vol est directement liée à la masse totale de l'engin. Trois prototypes de châssis ont été modélisés afin de visualiser les variantes possibles. Le châssis retenu rassemble les avantages des trois premiers modèles : poids modulabilité protection des hélices et moteurs design propeté du câblage faibles coûts de fabrication solidité Outre les contraintes statiques et dynamiques, le châssis doit supporter les vibrations engendrées par les 4 moteurs. La version finale est une adaptation du prototype afin de rendre le Sphéniscoptère usinable.
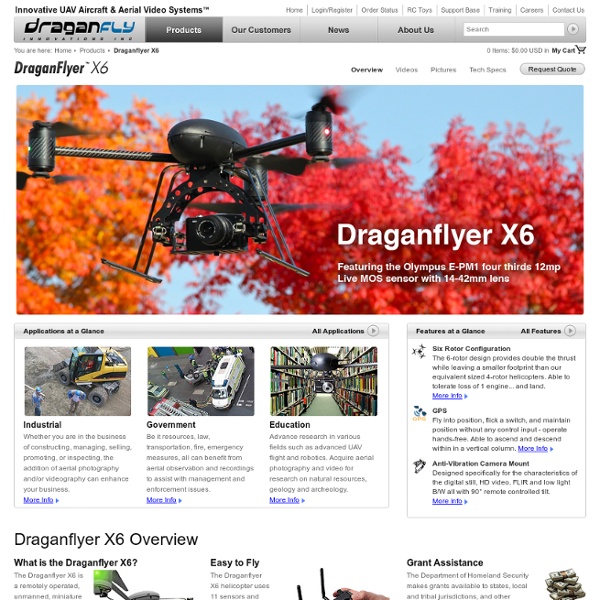
The Draganflyer range of UAVs October 2009 – Draganflyer c/w stills and video camera ordered. Also second Transmitter so that clients can use one to control the camera whilst I hover. That’s the theory, anyway Early November 2009. Mid November It’s being shipped last week in November! Late November (29th) Oops. December It’s arrived. 2 days (excellent) training from Air2Ar and it’s all mine Winter 2009/10 Practice, practice, practice on the calm days. Feb 2010 Had my first paying job. 360 Panorama of a City. Autumn 2010 My first repeat Order – the same company that commissioned the first job – they must have been happy with the results. September Blade finall bites the dust. End 2010 A good first year.
The Auto Moto - 3 Wheel Scooter - 150cc Scooter - Trike - 3 Wheel Motorcycle Flight dynamics Flight dynamics is the study of the performance, stability, and control of vehicles flying through the air or in outer space.[1] It is concerned with how forces acting on the vehicle influence its speed and attitude with respect to time. Aircraft[edit] Axes to control the attitude of a plane This section focuses on fixed-wing aircraft. Flight dynamics is the science of air vehicle orientation and control in three dimensions. Spacecraft and satellites[edit] Axes to control the attitude of a satellite The forces acting on spacecraft are of three types: propulsive force (usually provided by the vehicle's engine thrust); gravitational force exerted by the Earth and other celestial bodies; and aerodynamic lift and drag (when flying in the atmosphere of the Earth or another body, such as Mars or Venus). References[edit]
Waterproof Quadcopter - QuadH2o Multi Rotor The QuadH2o Waterproof Quadcopter! Kit form - build your self Each QuadH2o kit comes complete with Painted body & armsCarbon Legs with Black FoamFPV dome with carbon ring / sealNEW! Made to order, 15 day lead time