
Autotuning Howto. OpenPilot. GCS Raspbian package ( Raspberry Pi ) - News. Hello I'm posting a new thread outside developer section about this, now it's more accessible.
Original thread is here: Raspberry Pi is a low voltage credit card size mini board based on ARM you can find for 30€: Electronics - FPV OSD. The OSD (On Screen Display) is an instrument that provides the pilot with navigation information helping him to conduct a safe and conscious FPV (First Person View) flight.

The information are imposed on an image from on-board camera, giving more control over the RC model and facilitating safe return to base. OSD displays all key information about model: GNSS position and time,altitude and speed over ground in metric or imperial units,course (CMG) and number of visible satellites,distance and direction to base,current, voltage and consumed energy for electric planes,way-points near to plane.
OSD with autopilot it can display additional information about: artificial horizon,barometric altitude,variometer (also provide acoustic vario signal),magnetic heading (compass). With OSD FPV flights are safer. OSD supports PAL and NTSC standards. Built in OSD menu for configuration and settings of the device. OSD screen All views are user defined. Meaning of the OSD screen markers The FPV OSD in flight. Electronics - UAV Autopilot. The RC on-board computer called AutoPitLot is experimental avionics platform for amateur Unmanned Aerial Vehicles (UAV).

It is designed as a starter board for research on autonomous flight systems. Device in current phase of development performs several measurements, process data, store it on SD card logger or present it on-line in Windows application via radio-modem. It works as a multi copter flight controller. Below on the picture is computer main board version 2.0 in the enclosure. QFO Labs, Inc. Picopter’s maiden flight! « Botched. Bitcraze. Quanton de commande de vol.
I am proud to have the opportunity to announce hardware availability of a new target for TauLabs.

xAircraft TagV6 Introduction. News Page. HTS-iView - Telemetry Interface for use with Apple products Take advantage of the ever-changing world of communication technology with the latest from Hitec!

Our HTS-iView seamlessly integrates advancements in portable computing with the world of radio control, bringing real-time telemetry data to your Apple® devices such as the iTouch, iPhone and iPad. With the applicable onboard sensors and airborne sensor station, the iView can display your model's GPS-based altitude, location, distance and speed data, four temperature and two RPM readings, as well as remaining fuel level, current draw, voltage, wattage and receiver battery levels.
Whether you are an enthusiastic pilot demanding comprehensive feedback during flight or an everyday sport flier looking for that added information, the HTS-iView puts the world of telemetry at your fingertips. Check the new product out click here. 0005 OpenPilot CC/CC3D Protective "Tomb", Frankenquad Designs - Multi-Rotor Products.
005 OpenPilot Copter Control/CC3D Protective Case V3 NOW WITH SWD PORT ACCESS This is not Just a Cover, it is a Protective Case that, Can not, WILL NOT crack like ABS, Delrin, PVC, Plexi and other plastics!!

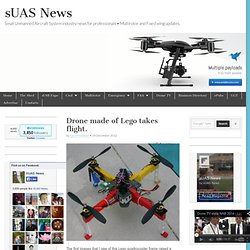
ArduCopter 2.9 Accel Calibration. Drone made of Lego takes flight. The first images that I saw of this Lego quadrocopter frame raised a smile.
Réglages PID multiwii / Multiwii PID Settings (English subtitles availables) Arducopter Tuning Guide. HyTAQ : un quadrirotor se déplaçant dans les airs et sur terre. HyTAQ : un quadrirotor se déplaçant dans les airs et sur terre HyTAQ pour Hybrid Terrestrial and Aerial Quadrotor est un drone qui contrairement à la concurrence possède la particularité de pouvoir se déplacer dans les airs comme sur terre.
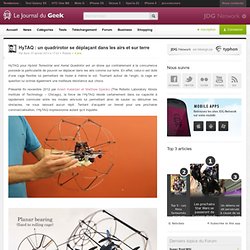
En effet, celui-ci est doté d’une cage flexible lui permettant de rouler à même le sol. Tournant autour de l’engin, la cage en question lui octroie également une meilleure résistance aux chocs. Présenté fin novembre 2012 par Arash Kalantari et Matthew Spenko (The Robotic Laboratory Illinois Institute of Technology – Chicago), la force de l’HyTAQ réside certainement dans sa capacité à rapidement commuter entre les modes airs/sols lui permettant ainsi de sauter ou détourner les obstacles, ne vous laissant aucun répit. Tentant d’acquérir un brevet pour une prochaine commercialisation, l’HyTAQ impressionne autant qu’il inquiète. Www.aslatech.com. YouTube. Forums - Variable Pitch Quad-Copter.. Yes, its coming.. - Page 1. Ben, The later pics look a better idea to me, both from a damage limitation aspect, and a balance aspect, less inertia a long way from the centre of gravity.
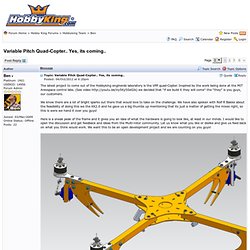
I used to fly a (full size ) PA39 twin, which had 30 gallon tip tanks, and it was very noticable the difference in roll handling between empty and full tip tanks, and the same would be true if the weight is out at the end of the booms on this concept. One negative about using the torque tube heli tail booms is that to use lift props means that a lot more power is being transmitted over the gears, and possibly at a much higher rotational speed, which may not be good for reliability and longevity.They are fragile enough when running at heli speed in a 500, it's the deliberate weak link that lets go if ground contact happens, as I've discovered to my cost.
Belt drive would be better, as the pulleys are metal. Again, to reduce the outboard weight, it might be feasible to use belt drive from the motor mounted closer inboard. Shrediquette - a multirotor MAV by W. Thielicke. Botched. Super Combo HX4 SHELBY + 4 ESC + 4 Moteurs + MiniPilot - La DroneShop. A Quadrocopter Powered By Raspberry Pi! Quadriolo, un quadrimoteur en tube PVC. Détournement de matériaux...

NodeCopter.js. New Products : Flexacopter.com, The Art building multirotors. ArduPirates' setups. PPMsumRC - arducopter - Arduino-based autopilot for mulitrotor craft, from quadcopters to traditional helis. On FrSky receivers called CPPM PPM and PWM are two different protocols for radio information. The PPM has the advantage that you can get all the channels information through one port only. Videos - QGroundControl GCS. FreeIMU: a libre 9-10 DOM/DOF inertial measurement unit. FreeIMU is an ongoing research project which aims to design Open Hardware 9/10 DOM/DOF Inertial Measurement Units as well as easy to use Orientation and Motion Sensing libraries, built on top of the Arduino platform. The goal of the FreeIMU Framework is to simplify the development of projects based upon the most powerful and new consumer grade inertial, magnetic and pressure sensors.
The main application of FreeIMU is orientation sensing: by reading the data from the various sensors is possible to compute precisely the orientation of FreeIMU in the space. Recent boards also feature an high resolution barometer allowing to precisely track the device altitude. This can be useful in many applications: human-computer interaction device prototyping, flying machines, robots, human movement tracking and everywhere orientation sensing is a key aspect. Blogs. Last updated on Fri, 2012-11-23 12:07. Originally submitted by fabio on 2012-10-30 16:02. I'm happy to finally publish a first working version of the FreeIMU Magnetometer and Accelerometer Calibration GUI.
Currently, it should allow you to visually calibrate your accelerometer and magnetometer after you connected your IMU to a microcontroller running the FreeIMU_serial example in the FreeIMU library.