
Scalar field theory In theoretical physics, scalar field theory can refer to a classical or quantum theory of scalar fields. A field which is invariant under any Lorentz transformation is called a "scalar", in contrast to a vector or tensor field. The quanta of the quantized scalar field are spin-zero particles, and as such are bosons. The only fundamental scalar field that has been observed in nature is the Higgs field. , has a particularly simple form: it is diagonal, and here we use the + − − − sign convention. Classical scalar field theory[edit] Linear (free) theory[edit] where is known as a Lagrangian density, dD-1 ≝ dx⋅dy⋅dz ≝ dx1⋅dx2⋅dx3 for the three spatial coordinates, is the Kronecker delta function and where for the ρ-th coordinate xρ . . is sometimes known as a mass term, due to its interpretation in the quantized version of this theory in terms of particle mass. The equation of motion for this theory is obtained by extremizing the action above. is the Laplace operator. The n! . , of to be satisfies .
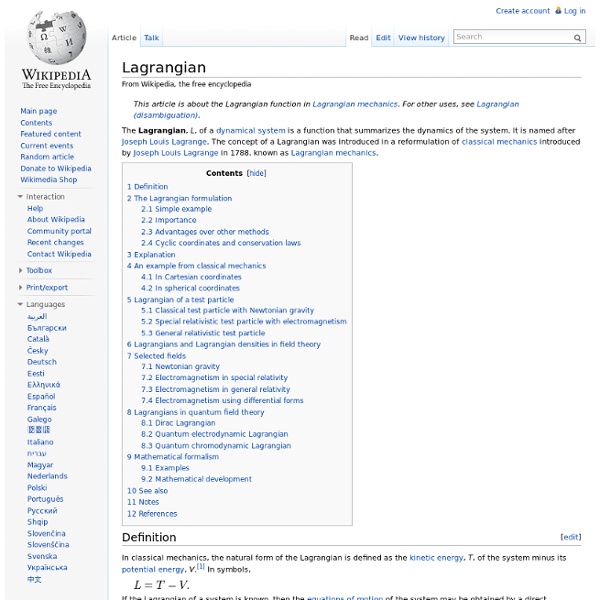
Lagrangian mechanics Lagrangian mechanics is a re-formulation of classical mechanics using the principle of stationary action (also called the principle of least action).[1] Lagrangian mechanics applies to systems whether or not they conserve energy or momentum, and it provides conditions under which energy, momentum or both are conserved.[2] It was introduced by the Italian-French mathematician Joseph-Louis Lagrange in 1788. The use of generalized coordinates may considerably simplify a system's analysis. For example, consider a small frictionless bead traveling in a groove. If one is tracking the bead as a particle, calculation of the motion of the bead using Newtonian mechanics would require solving for the time-varying constraint force required to keep the bead in the groove. Conceptual framework[edit] Generalized coordinates[edit] Illustration of a generalized coordinateq for one degree of freedom, of a particle moving in a complicated path. Concepts and terminology[edit] . Mathematical formulation[edit]
Chiral symmetry breaking In particle physics, chiral symmetry breaking is an example of spontaneous symmetry breaking affecting the chiral symmetry of a gauge theory such as Quantum Chromodynamics, the quantum field theory of the strong interactions. The principal and manifest consequence of this symmetry breaking is the generation of 99% of the mass of nucleons, and hence the bulk of all visible matter, out of very light quarks.[1] For example, for the proton, of mass mp= 938 MeV, the bound quarks, with mu ≈ 2 MeV , md ≈ 5 MeV, only contribute about 9 MeV to its mass, the bulk of it arising out of QCD chiral symmetry breaking, instead.[2] Yoichiro Nambu was awarded the 2008 Nobel prize in physics for his understanding of this phenomenon. The origin of the symmetry breaking may be described as an analog to magnetization, the fermion condensate (vacuum condensate of bilinear expressions involving the quarks in the QCD vacuum), formed through nonperturbative action of QCD gluons, with v ≈ −(250 MeV)3. .
Liénard–Wiechert potential These expressions were developed in part by Alfred-Marie Liénard in 1898 and independently by Emil Wiechert in 1900[1] and continued into the early 1900s. Implications[edit] The study of classical electrodynamics was instrumental in Einstein's development of the theory of relativity. Analysis of the motion and propagation of electromagnetic waves led to the special relativity description of space and time. The Liénard–Wiechert formulation is an important launchpad into more complex analysis of relativistic moving particles. The Liénard–Wiechert description is accurate for a large, independent moving particle, but breaks down at the quantum level. Quantum mechanics sets important constraints on the ability of a particle to emit radiation. Universal Speed Limit[edit] The force on a particle at a given location r and time t depends in a complicated way on the position of the source particles at an earlier time tr due to the finite speed, c, at which electromagnetic information travels. where .
Interpretations of quantum mechanics An interpretation of quantum mechanics is a set of statements which attempt to explain how quantum mechanics informs our understanding of nature. Although quantum mechanics has held up to rigorous and thorough experimental testing, many of these experiments are open to different interpretations. There exist a number of contending schools of thought, differing over whether quantum mechanics can be understood to be deterministic, which elements of quantum mechanics can be considered "real", and other matters. This question is of special interest to philosophers of physics, as physicists continue to show a strong interest in the subject. They usually consider an interpretation of quantum mechanics as an interpretation of the mathematical formalism of quantum mechanics, specifying the physical meaning of the mathematical entities of the theory. History of interpretations[edit] Main quantum mechanics interpreters Nature of interpretation[edit] Two qualities vary among interpretations:
Lagrange-Formalismus Für Systeme mit einem generalisierten Potential und holonomen Zwangsbedingungen lautet die Lagrange-Funktion wobei die kinetische Energie und die potentielle Energie des betrachteten Systems bezeichnen. Man unterscheidet sogenannte Lagrange-Gleichungen erster und zweiter Art. Im engeren Sinn versteht man unter dem Lagrange-Formalismus und den Lagrange-Gleichungen aber die zweiter Art, die häufig einfach als Lagrange-Gleichungen bezeichnet werden: Dabei sind generalisierte Koordinaten und deren Zeitableitungen. Lagrange-Gleichungen erster und zweiter Art[Bearbeiten] Mit den Lagrange-Gleichungen erster Art lassen sich die Zwangskräfte explizit ausrechnen. Punktteilchen im mit den Ortsvektoren , deren Koordinaten durch voneinander unabhängige (holonome) Zwangsbedingungen der Form mit eingeschränkt sind (wobei eine explizite Zeitabhängigkeit zugelassen wurde). -dimensionale Mannigfaltigkeit eingeschränkt ( ist die Anzahl der Freiheitsgrade). Die Zwangskräfte dargestellt werden: Die sind die Massen der . also
Glueball In particle physics, a glueball is a hypothetical composite particle.[1] It consists solely of gluon particles, without valence quarks. Such a state is possible because gluons carry color charge and experience the strong interaction. Glueballs are extremely difficult to identify in particle accelerators, because they mix with ordinary meson states.[2] Theoretical calculations show that glueballs should exist at energy ranges accessible with current collider technology. However, due to the aforementioned difficulty (among others), they have (as of 2013[update]) so far not been observed and identified with certainty.[3] The prediction that glueballs exist is one of the most important predictions of the Standard Model of Particle Physics that has not yet been confirmed experimentally.[4] Properties of glueballs[edit] Constituent Particles and Color Charge[edit] Total Angular Momentum[edit] Fundamental particles with J=0 or J=2 are easily distinguished from glueballs. Electric Charge[edit]
Invarianz Invarianz ist die Unveränderlichkeit von Größen. Das zugehörige Adjektiv lautet invariant. Der Begriff wird in folgenden Wissenschaften verwendet: Als Invariante wird die Größe selbst bezeichnet, die unverändert bleibt: Siehe auch: Wick rotation In physics, Wick rotation, named after Gian-Carlo Wick, is a method of finding a solution to a mathematical problem in Minkowski space from a solution to a related problem in Euclidean space by means of a transformation that substitutes an imaginary-number variable for a real-number variable. This transformation is also used to find solutions to problems in quantum mechanics and other areas. Overview[edit] Wick rotation is motivated by the observation that the Minkowski metric [with (−1, +1, +1, +1) convention for the metric tensor] and the four-dimensional Euclidean metric are equivalent if one permits the coordinate t to take on imaginary values. , sometimes yields a problem in real Euclidean coordinates x, y, z, which is easier to solve. Statistical and quantum mechanics[edit] Wick rotation connects statistical mechanics to quantum mechanics by replacing inverse temperature with imaginary time . . is , where is Boltzmann's constant. is, up to a normalizing constant, under a Hamiltonian . where
Hamiltonsches Prinzip Das Hamiltonsche Prinzip der Theoretischen Mechanik ist ein Extremalprinzip. Physikalische Felder und Teilchen nehmen danach für eine bestimmte Größe einen extremalen (d. h. größten oder kleinsten) Wert an. Diese Bewertung nennt man Wirkung, mathematisch ist die Wirkung ein Funktional. Die Wirkung erweist sich in vielen Fällen nicht als minimal, sondern nur als „stationär“ (d. h. extremal). Ein Beispiel ist das Fermatsche Prinzip, nach dem ein Lichtstrahl in einem Medium von allen denkbaren Wegen vom Anfangspunkt zum Endpunkt den Weg mit der geringsten Laufzeit durchläuft. Die Newtonschen Bewegungsgleichungen folgen bei geeignet gewählter Wirkung aus dem Hamiltonschen Prinzip. Geschichte[Bearbeiten] Pierre Maupertuis sprach 1746 als erster von einem allgemeingültigen Prinzip der Natur, extremal oder optimal abzulaufen (vgl. auch Ockhams Rasiermesser). Mathematische Beschreibung[Bearbeiten] In der Mechanik ist die Wirkung das zeitliche Integral über eine Funktion der Zeit , des Ortes
Matrix mechanics Matrix mechanics is a formulation of quantum mechanics created by Werner Heisenberg, Max Born, and Pascual Jordan in 1925. In some contrast to the wave formulation, it produces spectra of energy operators by purely algebraic, ladder operator, methods.[1] Relying on these methods, Pauli derived the hydrogen atom spectrum in 1926,[2] before the development of wave mechanics. Development of matrix mechanics[edit] In 1925, Werner Heisenberg, Max Born, and Pascual Jordan formulated the matrix mechanics representation of quantum mechanics. Epiphany at Helgoland[edit] In 1925 Werner Heisenberg was working in Göttingen on the problem of calculating the spectral lines of hydrogen. "It was about three o' clock at night when the final result of the calculation lay before me. The Three Fundamental Papers[edit] After Heisenberg returned to Göttingen, he showed Wolfgang Pauli his calculations, commenting at one point:[4] In the paper, Heisenberg formulated quantum theory without sharp electron orbits. W.
Mass gap In quantum field theory, the mass gap is the difference in energy between the vacuum and the next lowest energy state. The energy of the vacuum is zero by definition, and assuming that all energy states can be thought of as particles in plane-waves, the mass gap is the mass of the lightest particle. Since exact energy eigenstates are infinitely spread out and are therefore usually excluded from a formal mathematical description, a stronger definition is that the mass gap is the greatest lower bound of the energy of any state which is orthogonal to the vacuum. Mathematical definitions[edit] For a given real field with being the lowest energy value in the spectrum of the Hamiltonian and thus the mass gap. with the constant being finite. Examples from classical theories[edit] An example of mass gap arising for massless theories, already at the classical level, can be seen in spontaneous breaking of symmetry or Higgs mechanism. This equation has the exact solution —where and being References[edit]
Bloch sphere Bloch sphere In quantum mechanics, the Bloch sphere is a geometrical representation of the pure state space of a two-level quantum mechanical system (qubit), named after the physicist Felix Bloch.[1] Quantum mechanics is mathematically formulated in Hilbert space or projective Hilbert space. The space of pure states of a quantum system is given by the one-dimensional subspaces of the corresponding Hilbert space (or the "points" of the projective Hilbert space). The Bloch sphere is a unit 2-sphere, with each pair of antipodal points corresponding to mutually orthogonal state vectors. and Definition[edit] Given an orthonormal basis, any pure state of a two-level quantum system can be written as a superposition of the basis vectors , where the coefficient or amount of each basis vector is a complex number. to be real and non-negative. , meaning . in the following representation: with . is one of the ket vectors or the representation is unique. on the unit sphere in can be expanded using the identity
Schrödinger equation In quantum mechanics, the Schrödinger equation is a partial differential equation that describes how the quantum state of some physical system changes with time. It was formulated in late 1925, and published in 1926, by the Austrian physicist Erwin Schrödinger.[1] In classical mechanics, the equation of motion is Newton's second law, and equivalent formulations are the Euler–Lagrange equations and Hamilton's equations. All of these formulations are used to solve for the motion of a mechanical system and mathematically predict what the system will do at any time beyond the initial settings and configuration of the system. In quantum mechanics, the analogue of Newton's law is Schrödinger's equation for a quantum system (usually atoms, molecules, and subatomic particles whether free, bound, or localized). The concept of a state vector is a fundamental postulate of quantum mechanics. Equation[edit] Time-dependent equation[edit] Time-independent equation[edit] In words, the equation states: