
Interface universelle pour systèmes interactifs Un article de Wikipédia, l'encyclopédie libre. Urbi[1] est une plate-forme logicielle, sous licence libre BSD, utilisée pour le développement d'applications dans les domaines de la robotique et des systèmes complexes. Urbi intègre une architecture distribuée de composants en C++ appelée UObject, ainsi qu'un langage de script parallèle et événementiel appelé urbiscript. UObject facilite l'intégration d'objets C++ ou Java dans le langage, et permet leur exécution locale ou distante, tandis qu'urbiscript agit comme un outil d'orchestration pour coordonner les différents composants et leurs interactions. Le langage urbiscript[modifier | modifier le code] Urbi a été initialement développé depuis 1999 par Jean-Christophe Baillie au laboratoire de Robotique Cognitive de l'ENSTA ParisTech à Paris. Fonctions[modifier | modifier le code] Exemples[modifier | modifier le code] whenever (ball.visible) { headYaw.val += camera.xfov * ball.x & headPitch.val += camera.yfov * ball.y }; Livrés : Non maintenus :
Ubercode - How to write programs! - www.ubercode.com 7 covetable toys that blurred the line between robot, pet and friend Guy Hoffman isn’t just a roboticist — he’s also an animator and a jazz musician. And so as he set out to build robots that communicate with people, he took inspiration from what he learned in animation school and focused on subtle, fluid movements — the kind created by going frame-by-frame. He also took an acting class, so he could think more about how emotions are expressed through movement. Watch today’s talk — Robots with “soul” — to see two of Hoffman’s creations in action. Naturally, Hoffman’s work reminds us of a few prior inventions that attempted to make a robot more like a companion. Giga Pets Often credited as the “first virtual pet,” Giga Pets were released in 1997 by Tiger Toys. The FurbyFor anyone who scoured toystores and braved unthinkable lines during the holiday season of 1998 — in hopes of getting their hands on a Furby – the concept of an electronic pet will sound familiar. i-CybieAIBO inspired many a robotic dog—the cutest of which was i-Cybie, from Silverlit Toys.
Gostai - Urbi / Jean Michel Billaut Untitled from Jean Michel Billaut on Vimeo. Jean Christophe a créé Gostai il y a déjà 4 ans (20 personnes aujourd'hui, société basée à Paris). Gostai fabrique des logiciels pour la robotique industrielle, la robotique grand public et de services. Jean Christophe revenait d'Anchorage où il a participé à l'ICRA, qui est une conférence académique sur les robots... Dans ce e-billautshow, Jean Christophe se trouve au nord de Seattle, à Redmond plus exactement, le pays de Microsoft. Jean Christophe nous détaille les produits de Gostaï : 1/ Urbi : l'OS qui n'est plus propriétaire ... 2/ des outils de développement graphique : Gostai Studio qui permet de développer des comportements pour les robots, comportements qui peuvent être complexes 3/ Une architecture de "could computing" qui permet de distribuer "l'intelligence" des robots sur des serveurs. Que devient le business model de Gostaï, si l'OS n'est plus propriétaire ? Quand y aura-t-il des robots humanoïdes dans les rues de Paris ?
UnderC: C, C++ Interpreter UnderC for Windows and Linux vs 1.2.8 has been released The goal of the UnderC project is to produce a useful C++ interpreter which supports "pocket" versions of standard library classes (iostreams, strings, vectors, lists, maps, etc) and the STL algorithms. It is particularly intended to make life easier for students beginning C++. A beta version of USE (the UnderC Scripting Environment) is now available; see the downloads section. Now with less restrictive License as a Shared Library UnderC is freely available as both source and binaries under the GNU Library General Public License (LGPL). This version can import C++ libraries built with both MSVC++ 6.0 and GCC 2.95. Conversational C++ UnderC is a fully interactive system, where statements are evaluated immediately. UnderC Development List Dean Giberson has kindly offered to host the UnderC discussion list. C++ By Example Que has brought out C++ By Example in early 2002, which uses UnderC to introduce C++ interactively.
Robotics and Autonomous Systems - Shared grounding of event descriptions by autonomous robots Volume 43, Issues 2–3 , 31 May 2003, Pages 163–173 Perceptual Anchoring: Anchoring Symbols to Sensor Data in Single and Multiple Robot Systems a SONY Computer Science Laboratory, Paris, France b Artificial Intelligence Laboratory, Vrije Universiteit Brussel, Brussels, Belgium Available online 6 March 2003 , How to Cite or Link Using DOI Abstract The paper describes a system for open-ended communication by autonomous robots about event descriptions anchored in reality through the robot’s sensori-motor apparatus. Keywords Autonomous robots ; Event descriptions ; Open-ended Figures and tables from this article: Copyright © 2003 Elsevier Science B.V. Luc Steels is professor of Artificial Intelligence at the University of Brussels (VUB) and director of the Sony Computer Science Laboratory in Paris.
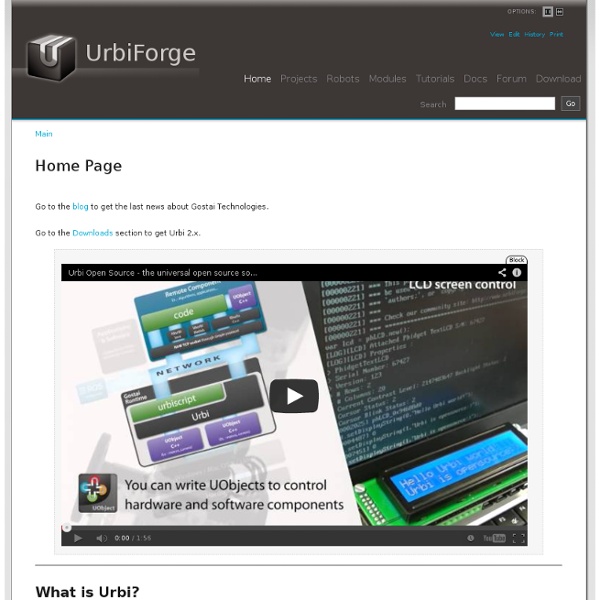
Urbi: un OS pour robots made in France - Gizmodo - Nous avons eu l'occasion de visiter les bureaux de Gostai. Depuis mai dernier, l'entreprise met Urbi, son OS, en open-source. L'intérêt? L’utilisation d’Urbi est très simple, ce qui le rend accessible aux débutants sans prise de tête. Une autre avancée assez bluffante se trouve être le cloud. Petite annotation à notre vidéo: Urbi est l’OS et Urbiscript est le language.
The Unlambda Programming Language Unlambda: Your Functional Programming Language Nightmares Come True Table of contents What's New in Unlambda World? Introduction What is Unlambda? What does Unlambda look like? What are the principles of Unlambda? Links and meta-links to other obfuscated programming languages Tutorial Functions and application Combinators Abstraction elimination Making abstraction elimination more efficient More Unlambda builtins v d c HOWTO: various programming techniques How do I write a loop in Unlambda? How can I represent numbers in Unlambda? How can I represent lists (and related data structures) in Unlambda? How do I write tests and booleans in Unlambda? A note about the Unlambda Quine Contest Implementing Unlambda First-class functions First-class continuations Garbage collection Promises Can Unlambda be compiled? Unlambda reference Unlambda distribution (download Unlambda here) Comprehensive Unlambda Archive Network (If you don't know what Unlambda is, skip this section and move directly to the introduction below.) Eric S.
DLFP: Des nouvelles d'Urbi, désormais utilisable pour les jeux vidéo Urbi, un puissant framework jusque-là principalement reconnu dans le domaine de la robotique, est maintenant compatible avec Qt, Ogre et Bullet. Ces différents « ponts », qui rendent possible la création de jeux vidéo ainsi que la simulation, sont Open Source comme l'est devenu Urbi il y a quelque temps. Retour rapide sur cet évènement qui n'a pas laissé indifférente la communauté d'Urbi. Résultats du concours Urbi Open Source Gostai, la société qui maintient Urbi, a lancé en septembre dernier un concours ayant pour but de développer un projet en utilisant Urbi. 1ère place : 2-high nous propose une tour de défense basée sur le Lego Mindstorm NXT et programmée grâce à Urbi. L'AR.Drone pilotable avec Urbi D'autre part, Urbi est désormais « officiellement » compatible avec l'AR.Drone de la société Parrot, un quadricoptère miniature télécommandable via le Wi-Fi. > Page consacrée à « Urbi 4 AR Drone »> Plus d'informations sur le blog de l'auteur
psmitt/UTFool: The UTFool Programming Language vous Jean Christophe Baillie from Paris ? Après Nao, voilà Jazz ! Untitled from Jean Michel Billaut on Vimeo. J'ai posté sur ce blog il y a quelques jours, une interview de Bruno Maisonnier d'Aldebaran. Société qui commercialise Nao (voir ici)... Voilà maitenant Gostai, société aussi française, qui démarre la commercialisation de son Jazz, un robot de téléprésence. Jean Christophe, fondateur de Gostai est d'ailleurs déjà passé sur le e-billautshow (ici). Il nous avait expliqué pourquoi il avait mis en open source son operating system Urbi, sa plateforme de développement de robots. Maintenant il aborde le marché du hardware : des robots de services... Pourquoi donc de lancer dans la fabrication de robots ? Autres applications ? Quelles sont les caractéristiques de Jazz ? Comment Jean Christophe voit l'évolution de la robotique de type humanoïde ? "La France n'est pas à la traîne dans ce secteur .." PS. Pour contacter Jean Christophe Baillie : contact(arobase)gostai.com