
Racetrack memory will make computers 100,000 times faster - Tucson Technology Researchers at the Laboratory of Nanomagnetism and Spin Dynamics are working on a form of memory that will work 100,000 times faster than today’s hard drives. Not only are they faster, they are also far more efficient. Current computers take an average of 2-3 minutes to transfer information from the hard disk to the RAM. This new technology would allow for computers to boot up instantly and retrieve data 100,000 times more rapidly. EPFL explains how it works: Like the tried and true VHS videocassette, the proposed solution involves data recorded on magnetic tape. EPFL is currently working with IBM to create a prototype. For more info: EPFL
TI's Chips Will Make 2012's Tablets Real-Time 3-D Supercomputers Texas Instruments has just outed a chip well ahead of its 2012 availability date, but it's such a hot ticket item it's worth knowing about--because it may enable your tablet PCs of next year to surpass your laptops of this year, with whizbang features like real-time 3-D video. The OMAP 5 chip packs two ARM Cortex A15 cores inside (a tech we've covered before) running at up to 2GHz. So right from the start it'll outperform the single-core 1GHz chips inside the current crop of tablet PCs--including the Cortex A8-based iPad--as well being twice as fast as upcoming A9-based tablets, which may include the iPad 2. But enough about the tech. TI also notes the chip enables "24-megapixel imaging" which would (shoved into a big smartphone or pocket tablet, along with the right lens technology) deal a serious death-blow to the compact digital camera market.
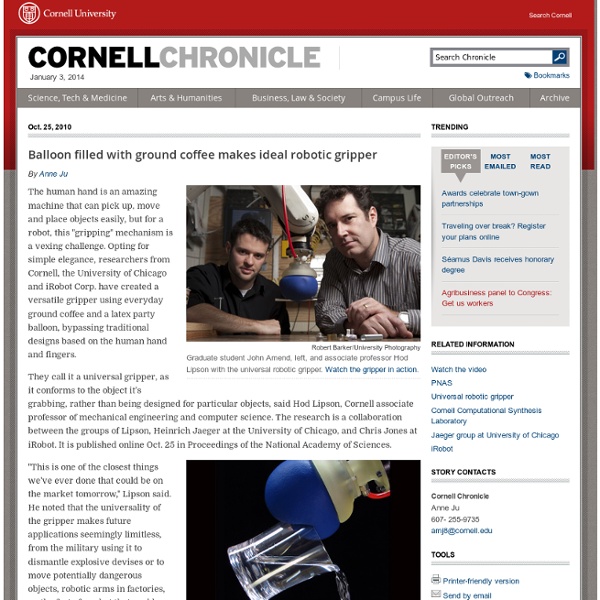
Caltech scientists first to trap light and sound vibrations together in nano... PASADENA, Calif.—Researchers at the California Institute of Technology (Caltech) have created a nanoscale crystal device that, for the first time, allows scientists to confine both light and sound vibrations in the same tiny space. "This is a whole new concept," notes Oskar Painter, associate professor of applied physics at Caltech. Painter is the principal investigator on the paper describing the work, which was published this week in the online edition of the journal Nature. "People have known how to manipulate light, and they've known how to manipulate sound. But they hadn't realized that we can manipulate both at the same time, and that the waves will interact very strongly within this single structure." Indeed, Painter points out, the interactions between sound and light in this device—dubbed an optomechanical crystal—can result in mechanical vibrations with frequencies as high as tens of gigahertz, or 10 billion cycles per second. (Photo Credit: M.
3D holograms enter the fourth dimension - tech - 03 November 2010 Video: Holograms go 4D Holography has just gained a fourth dimension, bringing the prospect of Star Wars-style holographic telepresence into the real world. Ever since Emmett Leith and Juris Upatnieks made the first laser holograms in 1963, holography has been the future of three-dimensional imaging. Once created, a hologram can be illuminated to create a pattern of light waves that replicates the light reflected by the original object, generating a 3D image without the need for special glasses. As such, holography seems an ideal medium for three-dimensional telepresence, like the famous "hologram" of Princess Leia in the first Star Wars movie. By election night 2020 the pair might be able to have that face-to-face conversation, though, according to Nasser Peyghambarian at the University of Arizona in Tuscon. Plastic pictures The key is a complex new plastic material the researchers have developed, which changes its refractive index when illuminated by laser light. Better to come
Light Touch projector makes any surface a touchscreen A previously little-known company from the UK called Light Blue Optics has demoed a projector at CES which allows users to interact with the light image as if it were a touchscreen. The Light Touch throws a 10-inch image at WVGA resolution at incredibly short distances thanks to the holographic projection technology involved. At the same time the infra-red touch sensitive system allows users to interact with social networks, multimedia sharing and any other applications that can use the Wi-Fi or Bluetooth support in the device to connect to the Internet. It comes with 2GB of onboard flash memory, a microSD card slot for expanding the storage and the battery life will last 2 hours. Expect to hear more from this one on the OEM front as interest grows. UPDATE: Two years on and although Light Blue Optics doesn't seem to have come up with the goods, others have. - Prodigy projection keyboard iPhone case turns any surface into a keyboard
Extraordinary lightning sprites discovered striking other planets, not just... By Daily Mail Reporter Updated: 17:29 GMT, 22 November 2011 It was only a couple of decades ago scientists discovered the existence of upwards lightning or ‘sprites’ 30 to 55 miles above the surface of the Earth. And now researchers at Tel Aviv University have discovered 'sprites' are not a phenomenon specific to our planet. Jupiter and Saturn experience lightning storms with flashes 1,000 or more times more powerful than those on Earth, says researcher Daria Dubrovin. Extraordinary: This sprite, or upwards lightening, was created in a bottle after recreating the conditions of Jupiter As offshoots of electric discharges caused by lightning storms, sprites are a valuable window into the composition of our atmosphere. Researchers are keen to know more about the possibility of lightning on other planets, explains Dubrovin, not only because it impacts the technological equipment used by space programs, but because it is another clue that could indicate the presence of extra-terrestrial life.
The Robopocalypse Cometh: IBM's Cyberbrain Smart as a Cat, Getting Smarter If the Matrix or I, Robot's view of artificial intelligence sent chilly shivers down your spine, then prepare for frostbite: IBM's artificial brain is now as smart as a cat--just a stop or two down the line from human powers. Speaking at the SC09 high-performance computing conference this week, IBM representatives from the cognitive computing team will be unveiling all the technical details behind their successes with large-scale cortical simulation and brain-like emulation. But it boils down quite neatly to news that the team has, for the first time, performed an in-computer simulation of a brain's workings at a near-instantaneous speed. The magic is all done in software, with particularly clever program elements that emulate the biochemical and electrical activity of neurons and synapses in real flesh-and-blood brains. Which is where the other bit of IBM's research comes in. [Via VentureBeat]
제품소개-바이올로이드 올로 바이올로이드 다이나믹셀 다이나믹셀 프로 로봇플랫폼 DARwIn-OP 모바일 솔루션 e-매뉴얼 다운로드 자가진단 A/S접수게시판 질문&답변 로봇갤러리 뉴스공지 교육사업안내 개설절차 개설신청 협력점안내 협력점게시판 EBS로봇파워 로봇제작가이드 2012로봇캠프 Copyright © 2011 Apycom jQuery Menus [기사] 오빤 `강남 로봇 스타일! [교육] Task 전문 과정 교육 (10월 20일 ~ 21일... [ 1 ] [기사] [인생은 아름다워] 아산 로봇가족 [행사] 2013년 로보티즈 사업설명회 [공지] 2012 국제로봇컨테스트 가족과 함께하는 ... 기타 [ 1 ] 대회일정 [ 1 ] 배트카(2학년 학생작품) 작성자 : 김천과학나라정쌤 올로 휴머노이드로 강남스타일 춤추기 작성자 : 로봇프라임제주 sweep's강남스타일 작성자 : sweep 제품소개 DARwln-OP 기술지원 e-Manual 포럼 뉴스&공지 협력점사업 협력점현황 로봇가이드 회사소개 인사말 회사정보 회사연혁 찾아오시는길 회원 가입 아이디/비밀번호 찾기 인증 메일 재발송