
Camouflage A soldier applying a disruptive pattern to his face; his helmet and jacket are both disruptively patterned Camouflage is the use of any combination of materials, coloration or illumination for concealment, either by making animals or objects hard to see (crypsis), or by disguising them as something else (mimesis). Examples include the leopard's spotted coat, the battledress of a modern soldier, and the leaf-mimic katydid's wings.[1] A third approach, motion dazzle, confuses the observer with a conspicuous pattern, making the object visible but momentarily harder to locate. The majority of camouflage methods aim for crypsis, often through a general resemblance to the background, high contrast disruptive coloration, eliminating shadow, and countershading. Military camouflage was spurred by the increasing range and accuracy of firearms in the 19th century. Non-military use of camouflage includes making cell telephone towers less obtrusive and helping hunters to approach wary game animals.
Flat universe may be the new flat Earth - physics-math - 18 May 2009 FOR centuries the ancients believed the Earth was flat. Evidence to the contrary was either ignored or effortlessly integrated into the dominant world view. Today we dismiss flat-Earthers as ignorant, yet we may be making an almost identical mistake – not about our planet, but about the entire universe. When it comes to the universe, "flatness" refers to the fate of light beams travelling large distances parallel to each other. Thanks in part to the Wilkinson Microwave Anisotropy Probe (WMAP) satellite, which revealed the density of matter and dark energy in the early universe, most astronomers are confident that ... Spying roboflies to get minicam eyes - tech - 22 May 2009 A MICROCHIP-sized digital camera patented by the California Institute of Technology could provide vision for the US military's insect-sized aircraft. It is light enough to be carried by these tiny surveillance drones and also uses very little power. In today's minicams, the image sensors and support circuitry are on separate microchips, and most of the power goes on communication between the chips. Now with Pentagon and NASA funding, Caltech's Jet Propulsion Lab in Pasadena has squeezed all the components of a camera onto one low-power chip, revealed in a US patent filed last week (www.tinyurl.com/ojwmdq). The gadget can be radio-controlled via a secure frequency-hopping link from up to a kilometre away, say its inventors.
The Probability of Evolution Introduction to the Mathematics of Evolution Chapter 15 The Probability of Evolution "A statistician is a person who stands in a bucket of ice water, sticks their head in an over and says: 'on average, I feel fine!'" K. Gene Complexes In prior chapters we talked about genes and DNA, among other things. A gene would be useless without the rest of the gene complex. No one really knows what the average number of nucleotide pairs (generally just referred to as "nucleotides") are in the average "gene complex." "While only a small fraction of the [DNA] directly encodes for proteins, every protein-encoding sequence is embedded within other functional sequences that regulate the expression of such proteins. Genetic Entropy & The Mystery of the Genome, page 38 The numbers he quotes are for humans. Before getting into human evolution, let us apply the concept of "gene complex" to the "first living cell." The Probability of the "First Living Cell" What if we randomly modified pure gibberish? And so on.
Why the Theory of Evolution Exists Introduction to the Mathematics of Evolution Chapter 1 Why the Theory of Evolution Exists "In the preface to the proceedings of the [Wistar] symposium, Dr. 's Enigma, Luther D. Introduction Many times students hear that the theory of evolution is a "proven fact of science." The reality is that the theory of evolution is NOT a proven fact of science. For example, the theory of evolution requires that life be created from simple chemicals. Such a conversion has never been demonstrated and such a conversion has never been proven to be possible. Even the simplest life on earth, which does not require a host, is far too complex to form by a series of accidents. The theory of evolution also requires massive amounts of new genetic information form by totally random mutations of DNA. New genetic information, including at least one new gene, has never been observed in nature, nor has new genetic information, created by random mutations of DNA, ever been accomplished in a science lab. Science Mr.
Bees algorithm In computer science and operations research, the Bees Algorithm is a population-based search algorithm which was developed in 2005.[1] It mimics the food foraging behaviour of honey bee colonies. In its basic version the algorithm performs a kind of neighbourhood search combined with global search, and can be used for both combinatorial optimization and continuous optimization. The only condition for the application of the Bees Algorithm is that some measure of topological distance between the solutions is defined. The effectiveness and specific abilities of the Bees Algorithm have been proven in a number of studies. [2][3] The Bees Algorithm is inspired by the foraging behaviour of honey bees. Honey bees foraging strategy in nature[edit] A colony of honey bees can extend itself over long distances (over 14 km) [4] and in multiple directions simultaneously to harvest nectar or pollen from multiple food sources (flower patches). The Bees Algorithm[edit] Applications[edit] See also[edit]
Cellular automaton The concept was originally discovered in the 1940s by Stanislaw Ulam and John von Neumann while they were contemporaries at Los Alamos National Laboratory. While studied by some throughout the 1950s and 1960s, it was not until the 1970s and Conway's Game of Life, a two-dimensional cellular automaton, that interest in the subject expanded beyond academia. In the 1980s, Stephen Wolfram engaged in a systematic study of one-dimensional cellular automata, or what he calls elementary cellular automata; his research assistant Matthew Cook showed that one of these rules is Turing-complete. The primary classifications of cellular automata as outlined by Wolfram are numbered one to four. Overview[edit] The red cells are the von Neumann neighborhood for the blue cell, while the extended neighborhood includes the pink cells as well. One way to simulate a two-dimensional cellular automaton is with an infinite sheet of graph paper along with a set of rules for the cells to follow. History[edit]
Collective intelligence: Ants and brain's neurons CONTACT: Stanford University News Service (415) 723-2558 Collective intelligence: Ants and brain's neurons STANFORD - An individual ant is not very bright, but ants in a colony, operating as a collective, do remarkable things. A single neuron in the human brain can respond only to what the neurons connected to it are doing, but all of them together can be Immanuel Kant. That resemblance is why Deborah M. "I'm interested in the kind of system where simple units together do behave in complicated ways," she said. No one gives orders in an ant colony, yet each ant decides what to do next. For instance, an ant may have several job descriptions. This kind of undirected behavior is not unique to ants, Gordon said. Gordon studies harvester ants in Arizona and, both in the field and in her lab, the so-called Argentine ants that are ubiquitous to coastal California. Argentine ants came to Louisiana in a sugar shipment in 1908. The motions of the ants confirm the existence of a collective. -jns/ants-
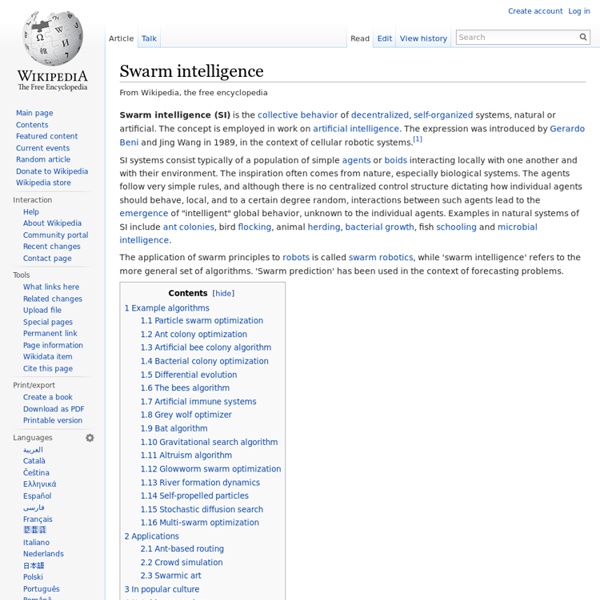
Genetic algorithm The 2006 NASA ST5 spacecraft antenna. This complicated shape was found by an evolutionary computer design program to create the best radiation pattern. Genetic algorithms find application in bioinformatics, phylogenetics, computational science, engineering, economics, chemistry, manufacturing, mathematics, physics, pharmacometrics and other fields. Methodology[edit] In a genetic algorithm, a population of candidate solutions (called individuals, creatures, or phenotypes) to an optimization problem is evolved toward better solutions. A typical genetic algorithm requires: a genetic representation of the solution domain,a fitness function to evaluate the solution domain. Once the genetic representation and the fitness function are defined, a GA proceeds to initialize a population of solutions and then to improve it through repetitive application of the mutation, crossover, inversion and selection operators. Initialization of genetic algorithm[edit] Selection[edit] Genetic operators[edit]
Life Science Technologies: Sanger Who? Sequencing the Next Generation In November 2008 Elaine Mardis of Washington University in St. Louis and colleagues published the complete genome sequence of an individual with acute myeloid leukemia. Coming just a few years after the decade-long, multibillion dollar Human Genome Project, the paper was remarkable on several levels. For one thing, the team sequenced two human genomes, both cancerous and normal, some 140 billion bases in all. More impressive, though, was what the study omitted: the 50 human genomes Mardis sequenced that year (albeit not as deeply) for the 1,000 Genomes Project. By Jeffrey M. Inclusion of companies in this article does not indicate endorsement by either AAAS or Science, nor is it meant to imply that their products or services are superior to those of other companies. The instruments in question, Illumina Genome Analyzers, are one of a cadre of so-called next-generation DNA sequencers. Such is life on genomics' bleeding edge. Unsurprisingly, the technology is attracting attention.
Alien From Earth Alien From Earth PBS Airdate: November 11, 2008 NARRATOR: It is the dream of every archaeologist who slogs through backbreaking days of excavation, the find that changes everything. ABC NEWS REPORTER (Archival Footage):A team of Australian and Indonesian archeologists has discovered the remains of what's believed to be a new species of human. HENRY GEE (Nature Magazine): This is a major discovery. CHRIS STRINGER (Natural History Museum, United Kingdom): It implies we are missing a huge amount of the story of human evolution. NARRATOR: Paradoxically, the discovery is huge because its pieces are not: a skeleton of an adult, the size of a three-year old child; a skull one-third the size of a modern human's. To many, the evidence is irrefutable. BILL JUNGERS (Stony Brook University): This is not a little person. NARRATOR: But some scientists just aren't buying it. RALPH HOLLOWAY (Columbia University): It just invites tremendous skepticism. NARRATOR: An astonishing discovery, a bitter controversy.
Travelling salesman problem The travelling salesman problem (TSP) asks the following question: Given a list of cities and the distances between each pair of cities, what is the shortest possible route that visits each city exactly once and returns to the origin city? It is an NP-hard problem in combinatorial optimization, important in operations research and theoretical computer science. Solution of a travelling salesman problem TSP is a special case of the travelling purchaser problem. In the theory of computational complexity, the decision version of the TSP (where, given a length L, the task is to decide whether the graph has any tour shorter than L) belongs to the class of NP-complete problems. The problem was first formulated in 1930 and is one of the most intensively studied problems in optimization. The TSP has several applications even in its purest formulation, such as planning, logistics, and the manufacture of microchips. History[edit] The origins of the travelling salesman problem are unclear. Richard M.
US To Launch New Moon Mission In 2010 The United States could launch a mission in 2010 that would land two stationary robots on the moon to collect rock samples before returning to earth, a US scientist said here Thursday. Carle Pieters of Brown University's Department of Geological Sciences, who is involved in the US space programme, said the aim of the Moonrise Mission was to land at the moon's largest and oldest crater - the South Pole Aitken Basin. "The purpose is to study how long ago the basin was formed and return materials derived from the deep interior to earth for analysis," Pieters said. "It will also help us to understand the unique process of how basins are formed." Pieters is also the chairwoman of the International Lunar Exploration Working Group, an organisation formed to promote cooperation between nations. She said scientists in the United States were still identifying which landing spots in the basin would be good for the twin robots to gather samples. All rights reserved. 2004 Agence France-Presse.