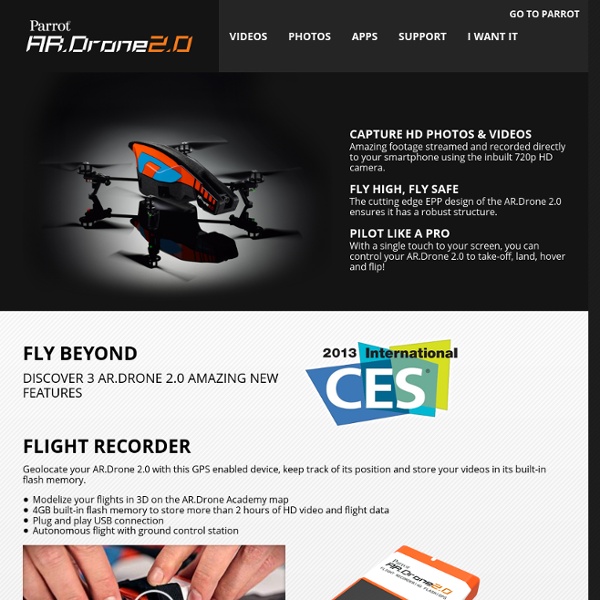
AR.Drone 2.0. Parrot new wi-fi quadricopter - AR.Drone.com - HD Camera - Parrot
“Create high-quality and stable movie shots” The Director mode lets you program automaticmovements so that you can shoot great videos justlike a movie director. Choose your movement: traveling, pan, crane… Adjust speed and moves in real time to compose your video sequence Stabilization system and video post-processing to get clean smooth shots Tune camera settings such as white balance, exposure and luminosity Selection of key sequences in the video Video sharing on YouTube and AR.Drone Academy *In-app purchase on ar.freeflight Learn more Camera moves
Goût d'idées
untitled
Pôle Industries Culturelles et Patrimoines - ICP - PRIDES
amazon
Nikon COOLPIX P900 16MP 83X Optical Zoom Digital Camera - Black : Point and Shoot Cameras
Overview Never miss a moment with the COOLPIX P900. This powerful Nikon 16MP compact digital camera boasts a breathtaking 83x optical zoom, swivelling 3"display for ease of framing, and grip-style design so you can capture sharp images no matter where you stand. Share photos and control your camera remotely, thanks to built-in WiFi and NFC. More Information
Related:
Related: