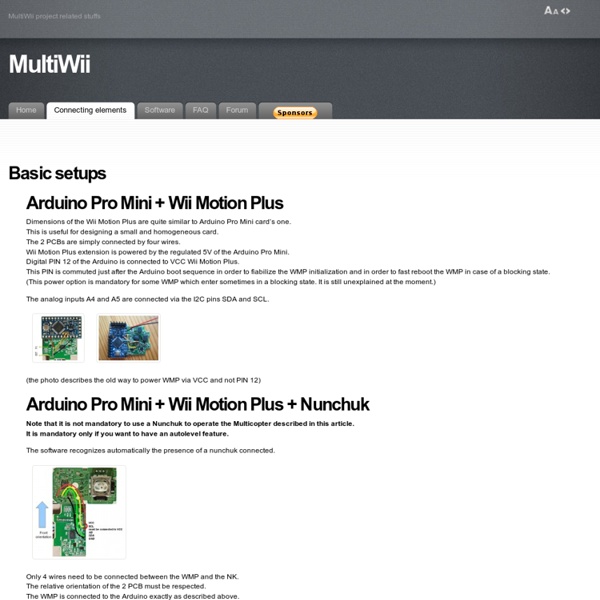
Arduino Pro Mini + Wii Motion Plus
DJI Phantom Zenmuse H3-2D Gimbal for Gopro HD - Quadcopters.co.uk
DJI Zenmuse H3-2D Brushless Gimbal for GoPro HD NEW DJI CHRISTMAS PROMOTION PRICE Please Note that DJI Phantom Owners and Naza V1 will need to purchase the Naza V2 Pmu to connect the Zenmuse. Wkm and Naza V2 Owners do not need any additional equipment. Phantom owners can now purchase the Zenmuse Upgrade kit which includes the tilt lever. News from the UK Beta Tester Richard Wheelan who runs a very helpful forum called DJIGUYS.COM is posting non biased reviews and tests on this new gimbal and is so far very impressed with the H3-2D so big thanks to Richard for all his help and support , he does a great job and has helped so many dji owners he was a obvious choice to be a beta tester for the new phantom zenmuse gimbal. Brief Spec and Features of the Zenmuse H3-2D Brushless Gimbal. OTHER INFORMATION•Power supply: 3S- 6S •Accuracy: + / - 0.08 degrees Aluminum alloy material and innovative mechanical design makes the gimbal extreme light weight (230g total, GoPro Hero3 included).
ArduPilot
The ArduPilot Project The ArduPilot project is a family of open source autopilots based on the Arduino open source computing platform. It consists of a choice of ArduPilot Mega (APM) electronics and a range of free software versions for different vehicles APM 2.6 is a pro-quality IMU autopilot based on the Arduino Mega platform, which can turn any RC vehicle into a fully autonomous Unmanned Aerial (or Ground) Vehicle. Depending on which software you choose, it can fly fixed-wing aircraft, multicopters, helicopters, and control ground rovers and boats. You can buy APM 2.5 for $159 ($240 with advanced GPS module) here. Features include: Free open source firmware supports planes, multicopters (quads, hex, oct, etc), helicopters and ground rovers! Hardware includes the following: 3-axis gyros3-axis accelerometers3-axis magnetometerBarometric pressure sensor for altitude5 or 10Hz GPS module4 Mb of onboard datalogging memory.
4 Operating Systems for the Arduino
I was working in the lab, late one night, when my eyes behold an eerie sight... Yes, Halloween is a long time ago, but that stupid song is still stuck in my head. I miss Halloween. I never got to post up pictures of my skeleton running off IXM's. :-)Anyway, I was browsing the Arduino forums and saw this cool post about DuinOS, a real-time embedded "operating system" for the Arduino. DuinOS by RobotGroupIt's a simple little realtime OS (RTOS) built by the guys at RobotGroup (hello!) Well, that's something of a stretch, but it's getting there... we won't get into context switching an RAM page swapping just yet :-) So then that got me thinking, why not write up the other "OS's" out there for the Arduino platform. Pyxis OS by ArduinoWillThis is a graphical OS built on top of the Arduino and TouchShield platform, and is written by ArduinoWill (aka Thom). Ok. And it's all zipped up over at the Open Source App Store here. I wish I still had screen shots...
Related:
Related:
