Calculus
Derivative
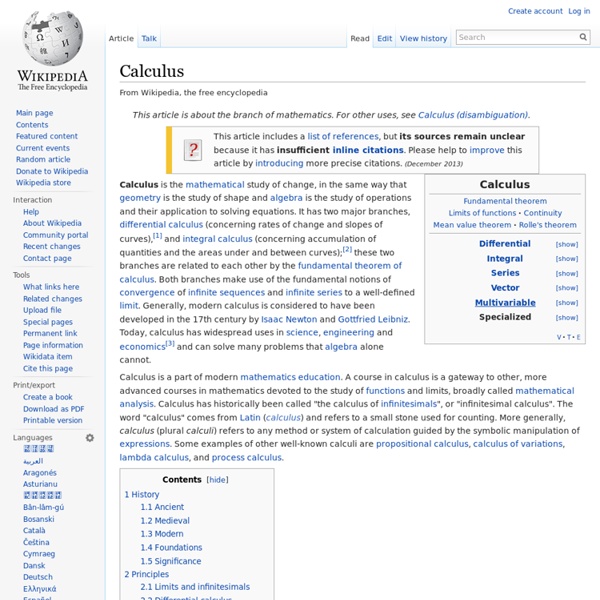
The graph of a function, drawn in black, and a tangent line to that function, drawn in red. The slope of the tangent line is equal to the derivative of the function at the marked point. The derivative of a function at a chosen input value describes the best linear approximation of the function near that input value. In fact, the derivative at a point of a function of a single variable is the slope of the tangent line to the graph of the function at that point. The process of finding a derivative is called differentiation. The reverse process is called antidifferentiation. Differentiation and the derivative[edit] The simplest case, apart from the trivial case of a constant function, is when y is a linear function of x, meaning that the graph of y divided by x is a line. y + Δy = f(x + Δx) = m (x + Δx) + b = m x + m Δx + b = y + m Δx. It follows that Δy = m Δx. This gives an exact value for the slope of a line. Rate of change as a limit value Figure 1. Figure 2. Figure 3. Figure 4.
Integral
A definite integral of a function can be represented as the signed area of the region bounded by its graph. The term integral may also refer to the related notion of the antiderivative, a function F whose derivative is the given function f. In this case, it is called an indefinite integral and is written: However, the integrals discussed in this article are termed definite integrals. The principles of integration were formulated independently by Isaac Newton and Gottfried Leibniz in the late 17th century. Through the fundamental theorem of calculus, which they independently developed, integration is connected with differentiation: if f is a continuous real-valued function defined on a closed interval [a, b], then, once an antiderivative F of f is known, the definite integral of f over that interval is given by Integrals and derivatives became the basic tools of calculus, with numerous applications in science and engineering. History[edit] Pre-calculus integration[edit] or is used (W3C 2006).
Vector calculus
Vector calculus (or vector analysis) is a branch of mathematics concerned with differentiation and integration of vector fields, primarily in 3-dimensional Euclidean space The term "vector calculus" is sometimes used as a synonym for the broader subject of multivariable calculus, which includes vector calculus as well as partial differentiation and multiple integration. Vector calculus plays an important role in differential geometry and in the study of partial differential equations. It is used extensively in physics and engineering, especially in the description of electromagnetic fields, gravitational fields and fluid flow. Vector calculus was developed from quaternion analysis by J. Willard Gibbs and Oliver Heaviside near the end of the 19th century, and most of the notation and terminology was established by Gibbs and Edwin Bidwell Wilson in their 1901 book, Vector Analysis. Basic objects[edit] Vector operations[edit] Algebraic operations[edit] scalar multiplication vector addition or
Multivariable calculus
Typical operations[edit] Limits and continuity[edit] A study of limits and continuity in multivariable calculus yields many counter-intuitive results not demonstrated by single-variable functions. approaches zero along any line through the origin. , it has a limit of 0.5. Continuity in each argument is not sufficient for multivariate continuity: For instance, in the case of a real-valued function with two real-valued parameters, , continuity of in for fixed and continuity of does not imply continuity of . It is easy to check that all real-valued functions (with one real-valued argument) that are given by are continuous in (for any fixed ). are continuous as is symmetric with regards to and . itself is not continuous as can be seen by considering the sequence (for natural ) which should converge to if was continuous. Thus, the limit does not exist. Partial differentiation[edit] The partial derivative generalizes the notion of the derivative to higher dimensions. Multiple integration[edit] See also[edit]
Related:
Related:
