Official OpenCPN Homepage
OpenCPN - Un chartplotter gratis per PC
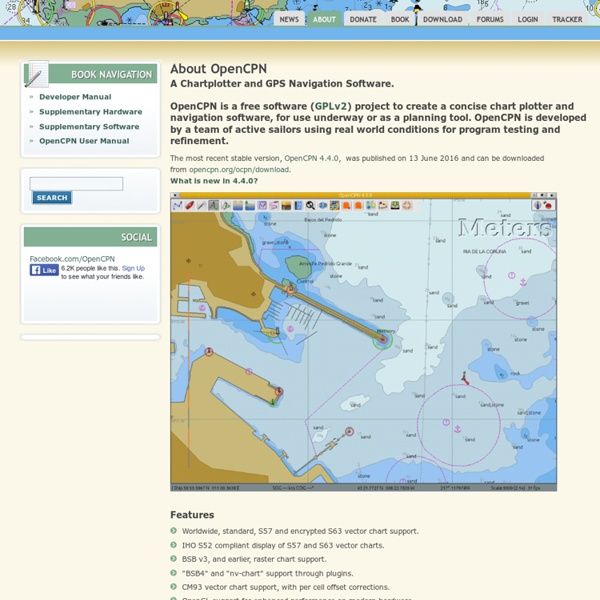
Questa volta devo proprio ringraziare l’amico Alex, che mi ha segnalato l’esistenza di un prodotto Open Source (e quindi gratuito) che trasforma un PC in un vero e proprio plotter cartografico, consentendo la pianificazione delle rotte prima della partenza e, se opportunamente interfacciato con gli strumenti installati a bordo (tramite collegamento NMEA, come al solito), diventa anche un valido strumento di aiuto alla navigazione, poiché non si limita a visualizzare la posizione dell’imbarcazione sulla mappa, ma consente altresì di monitorare tutti i dati di navigazione, dalla velocità, alla rotta, vento, AIS, Radar e quant’altro. Ma andiamo con ordine. OpenCPN accetta mappe nei seguenti formati: Bitmap (dette anche raster): Il formato accettato è il BSB v3. I file in questo formato hanno solitamente l’estensione .CAP oppure .KAP. Ho Scaricato il programma qualche giorno fa dal sito www.opencpn.org (questo è il link diretto alla pagina di download) e l’ho subito installato sul PC.
Medieval and Twentieth Century Navigation
The animation above depicts the means Columbus and mariners of the fifteenth century determined their location on the sea. They used simple arithmetic and a technique called Dead Reckoning Navigation. (Actually, Columbus judged the ship's speed through his own version of dead reckoning. Knowing the time elapsed between changes in his vessel's speed and direction of travel, Columbus entered his estimate of distances in a log. Rather than using a float to determine speed, Columbus, from his "feel" of the keel moving through the water along with his sense of wind and sail behavior, "knew" fairly accurately what the ship's speed was.) Here's how it worked: First of all, the navigator had to collect some articles to make a system which could "dead-reckon". Items Above Comprised Dead Reckoning Navigation The Process From arithmetic, we know that distance traveled in a selected direction is determined by multiplying speed by the time the vehicle travels at the chosen speed. Questions:1. 2. 3.
Sailing Greece - free yachting and charter holiday guide to sail the Greek islands - yacht charters Greece
Sailing GreeceSkip over navigation Sailing weather The Greek islands make up 20% of the total area of Greece, an ideal yachting area, creating a coastline of more than 15000 kilometres. The climate along this coastline is Mediterranean in character: mild moist winters and dry hot summers. The long charter season starts as early as March when air temperatures rise above the seawater temperatures, which has a stabilizing effect. will subsequently lead to an unstable atmosphere and showers If you wish to charter a yacht and would like independent advice on reliable yacht charter agents in Greece, please go to my yacht charter page. Otherwise, select a region below or use my anchor logo to navigate through Greece. Sailing regions of Greece Regions Islands & Areas Note, that the charts and the descriptions should not be used for navigational purposes, please also see the disclaimer. The best bases for yacht charters are Athens, Lavrion, Syros, Kos, Paros, Samos, Corfu, Lefkas. Further reading
Office of Naval Research Home Page
Il Marina di Riva di Traiano
Porto Turistico di Roma > Home ( DNN 4.4.0 )
Related:
Related:
