Quaternion
Mu-Ency -- The Encyclopedia of the Mandelbrot Set at MROB
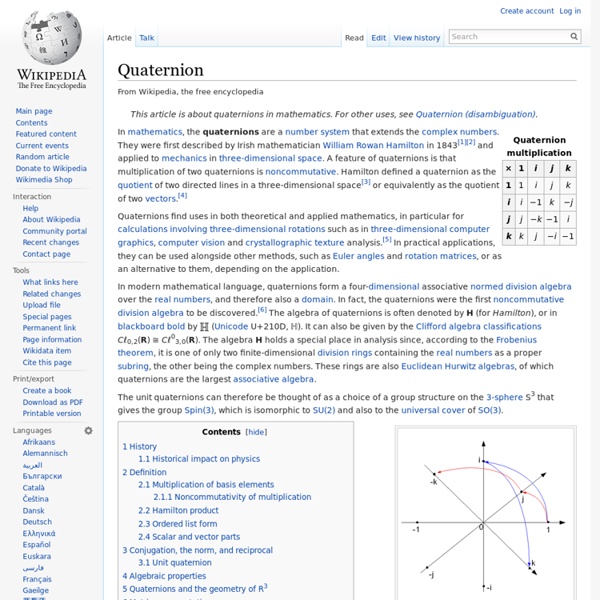
A second-order embedded Julia set This is a picture from the Mandelbrot Set, one of the most well-known fractal images in the world. (Click it for a larger version). The Mandelbrot Set is one of my hobbies, and I have collected a large amount of information about it. Here are some entries from Mu-Ency: Mandelbrot Set: The mathematical definition. More Pictures: Some entries with pictures of parts of the Mandelbrot Set are: R2, Cusp, Embedded Julia set, 2-fold Embedded Julia set, 4-fold Embedded Julia set, Paramecia, R2.C(0), R2.C(1/3), R2.1/2.C(1/2), R2t series, Seahorse Valley, Delta Hausdorff Dimension, Exponential Map, Reverse Bifurcation. You can also look up specific terms in the index. Coordinates of the image above: Center: -1.769 110 375 463 767 385 + 0.009 020 388 228 023 440 i Width (and height): 0.000 000 000 000 000 160 Algorithm: distance estimator Iterations: 10000
Calculating the Distance to the Horizon
For Any Game Home Up Site Map Assumptions | Method 1 | Method 2 Method 1 | Method 2 This is all based on the assumption that the horizon is the point on the world's surface at which the line of sight of the viewer, whatever their height, becomes parallel (tangential) to the surface of the world, and meets the surface of the world (so that the viewer cannot see any further than it). Note that I do not mention units in any of the equations on this page. Assumptions | Method 2 For a right-angled triangle: Where: R is the longest side (the hypotenuse), x and y are the other two sides. Using this equation on the triangle in the figure above, the longest side is the radius of the planet plus the height of the observer (r + h) , and the other two sides are d and r . Or, re-arranged: Or: So the total distance to the horizon is given by: This equation will work for any size world, and any height of observer. Assumptions | Method 1 Back to My Roleplaying Page .
Book Recommendations - EFnetMath
These are semi-official #math book recommendations for various topics. These are all personal recommendations of channel regulars. This means that given the collective experience of the channel, these are the books to read. We made an arbitrary split between the mathematics before and after calculus. General Interest These books are intended for a general audience. history/philosophy of math, 'how to solve it' The History of Calculus and Its Conceptual Development ( by Boyer A History of Mathematics ( by Boyer A Mathematician's Apology ( by Hardy Pre-College Mathematics This category is the catch-all for topics generally preceding calculus. Schaum's outlines -- I used various ones for college-level math and they were useful, and the calculus one below is well-recommended. Algebra Field and Galois Theory ( by Morandi
prime numbers
Related:
Related:
