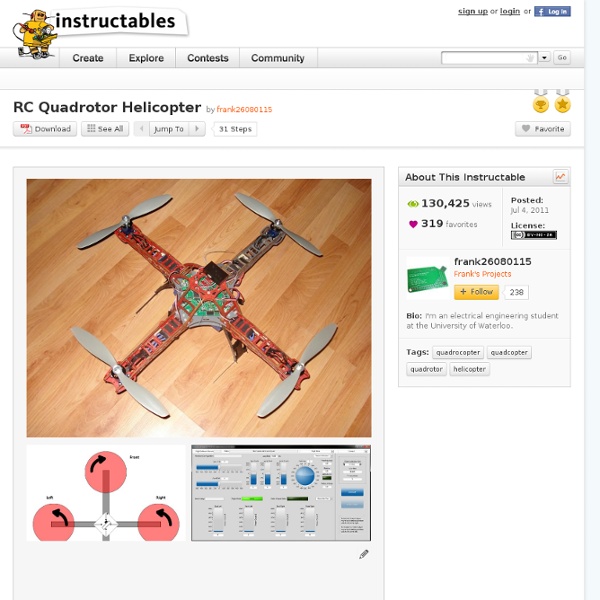
RC Quadrotor Helicopter
SimonK sim-/tgy
Quadcopter Build for Noobs
All - I have been following various threads on here for the last month or so and have been inspired to attempt my first RC build, a quadcopter. I will attempt to catalog the build as I go so that other inexperienced builders will have something to reference. Before I get started, many thanks to Old Man Mike (OMM), S11D336B, Signguy, Reverendrichie, Jesolins, and others for their informative threads and builds. A quadrotor, also called a quadrotor helicopter, is an aircraft that is lifted and propelled by four rotors. Many resources are available to prospective quadcopter builders. It is my understanding that the QuadPowered guys will soon be releasing detailed build instructions in the Docs section of the QuadPowered website. Quadrocopter and Tricopter Info Mega Link Index My Build: The following is a list that I have compiled of parts that I intend to use for the build. Part Choices: Frame www.quadpowered.com
Related:
Related:
