
Modelisme RC: Quadricoptere. Glossaire (termes, abréviations, acronymes) - 01 - Documentation en anglais - OpenPilot Wiki. Quadricoptère - Ma passion du modélisme. Voici par l’image un petit tutoriel pour construire un quadricoptère qui vous permettra de voler partout (dehors, dedans) et même de faire de la photo aérienne.
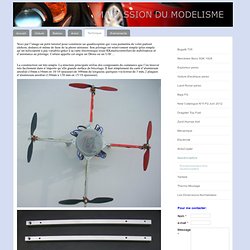
Son pilotage est relativement simple (plus simple qu’un hélicoptère à pas variable) grâce à sa carte électronique (type KKmulticontroller) de stabilisation et d’assistance au pilotage. Certain appelle cet engin un Drone ou un UAV… La construction est très simple. La structure principale utilise des composants du commerce que l’on trouver très facilement dans n’importe qu’elle grande surface de bricolage. Il faut simplement du carré d’aluminium anodisé (10mm x10mm en 10/10 épaiseur) de 300mm de longueur, quelques vis/écrous de 3 mm, 2 plaques d’aluminium anodisé (130mm x 130 mm en 15/10 épaisseur). En ce qui concerne la propulsion, j’ai utilisé quatre moteurs brushless de 150 Watts prévus pour fonctionner en Lipo 3s, je recommande un KV entre 900 et 1200. Voici le type de moteur qui va très bien avec des hélices 10x4,5 GWS. Uav. Quadricoptère. Les quadricoptères sont des engins fascinant et il est relativement facile de s’en construire de très performant.
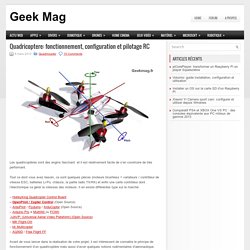
Tout ce dont vous avez besoin, ce sont quelques pièces (moteurs brushless + variateurs / contrôleur de vitesse ESC, batteries Li-Po, châssis, la partie radio TX/RX) et enfin une carte contrôleur dont l’électronique va gérer la vitesses des moteurs. Configuration et mise en oeuvre - Fcwiiki. De Fcwiiki. Le microcontrôleur contient d'office le bootloader arduino dans le cas des kits fcwii. Si vous avez un microcontrôleur vide, vous devez le flasher . [ modifier ] Installation de l'IDE arduino Le première étape consiste à l'installation de l' IDE arduino, qui peut être téléchargée ici [ modifier ] Téléchargement du projet multiwii Ensuite, il faut télécharger le code source du projet . Tout savoir sur la fabrication des drones. ACHETER CHINOIS? c'est possible! ACHETER CHINOIS? c'est possible! Forum MikroKopter en Francais - Accueil.
Fr/MikroKopter. QuadriRotor « Digiscopie Digiscope Robotique Ludique Robots Modélisme Radiomodélisme Radiocommande Jouets. J’ai tenté de concevoir un quadrirotor de A à Z.

Pour la partie mécanique, aucun problème, il suffit d’être minutieux. Pour la partie électronique, c’est une autre paire de manches. J’ai vite mesuré les limites de mes connaissances en informatique quand j’ai essayé de programmer l’appareil. Impossible d’écrire un programme cohérent pour faire en sorte que les gyroscopes contrôlent parfaitement les mouvements erratiques et brutaux de l’appareil sur ses 3 axes: roulis, tangage et lacet. J’ai lu une abondante littérature sur Internet sur le sujet, à base de filtres de Kalmann, de PID, d’intégration, etc.., sans toujours comprendre, même le titre des articles.
J’ai donc acheté, sur le site allemand de MIKROKOPTER, un module préprogrammé que j’ai adapté sur mon bâti, et là, révélation , un engin parfaitement maîtrisé, en lévitation même dans mon salon. Build Scout. Fr/AntriebsTheorie. Voir aussi: temps de vol, Astuces de débutants(en allemand) Nous allons évoqué ici le thème le plus important concernant la maitrise du Mikrokopter pour mémoire Pour un Moteur BL La tension => régime L'intensité => couple pourquoi avons-nous besoin de puissance pour planer ?
Parce que nous devons accélérer vers le bas une certaine masse d'air, pour recevoir la force nécessaire. Les pertes électriques Plus l'intensité du courant est élevé, plus les pertes électriques le sont. Rendement électrique Avec une batterie de 16V (Lipo4s), l'efficacité de la combinaison moteur/contrôleur est préférable à une batterie de 12V (Lipo3s). A puissance identique, une alimentation en 16V nécessitant moins d'intensité, génèrera moins de pertes (P = U * I) Cela nécessite l'adaptation au 16v de l'ensemble Moteurs/hélices (voir ci-dessous) Controlleur multicoptère FCWii. Contrôleur multicoptère FCWii. Critique et teste. La FCWii est un contrôle gyroscopique sur trois axes pour les multicoptères. On peut le commander ici : Voici une vidéo du tricoptère avec la FCWii installée. Le tricopère: TriWiiCopter « modélisme radio commandé. Le TriWiiCopter est un tricopter qui utilise des gyroscopes et accéléromètres de console vidéo Nintendo Wii.
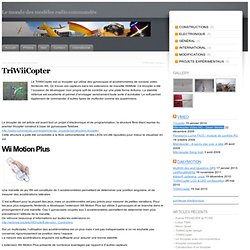
On trouve ces capteurs dans les extensions de manette WiiMote. Ce tricopter a été l’occasion de développer mon propre soft de contrôle sur une plate forme Arduino. La stabilité obtenue est excellente et permet d’envisager sereinement toute sorte d’acrobatie. 85981047quadricoptere-wii-pdf.pdf (Objet application/pdf) QuadrOliiv - FCWii inside ... Salut, La faute à certains et leurs vidéos , je me suis moi aussi lancé dans cette aventure. J'en profite pour remercier tous ceux qui donne de leur temps et connaissances pour répondre sur les différents sujets, ça permet à des mains gauches comme moi de se lancer ! Voilà ce que j'ai en commande ou déjà à la maison : - FCWii : Carte FCWii monter - Cable spécial feignants : Lot de cable Recepteur 4P - Fpv4ever. Construction de mon Quadricopter Hobby King - Le site de Stéphane. PDF qui permet de voir les composants les prix et les sites pour les acheter manuel-carte-hobby-king en Fr .doc Eléments du quadri-hk-au-15-12-2011.pdf FORUM qui en parle element-quadri-pour-kk2-mise-a-jour-au-28-11-13.pdf notice carte KK2 -fr.pdf.

MultiWii. Chassis QuadriX fpv4ever. Quadricoptère: fonctionnement, configuration et pilotage RC. Accueil - Fcwiiki. Programming and Tuning. Last Updated on July 17, 2012 In order to program and tune Scout you must install “Mission Planner”.

Mission Planner is application that allows you to update the firmware, configure, and program a flight path into the ArduPilot Mega. Install Mission Planner Download the Mission Planner version suitable for your computer: 64-bit MissionPlanner64 or 32-bit MissionPlanner32Connect the supplied USB cable to your computer and Scout’s Flight Controller.In the upper right corner select “Arducopter”, Select the ComPort that appears and Select 115200 as the baud rate.
Upload Firmware to ArduPilot Mega On the “Firmware” page click the appropriate airframe to upload the firmware. Calibrate Scout In the upper right corner select “Arducopter”, Select the ComPort that appears and Select 115200 as the baud rate. Calibrate Radio Transmitter Turn on your Radio transmitter. OpenPilot: créer votre drone en DIY et en Open Source. OpenPilot est un projet open source (GPLv3) dont le but est de proposer un ensemble software et hardware qui va surement révolutionner le monde du modélisme radiocommandé (RC).
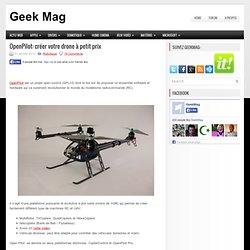
Il s’agit d’une plateforme puissante et évolutive à prix serré (moins de 100€) qui permet de créer facilement différent type de machines RC et UAV: MultiRotor: TriCopters, QuadCopters et HexaCoptershélicoptère (Barre de Bell / Flybarless)Avion (cf cette vidéo)Véhicule diverses: peut être adapté pour contrôler des véhicules terrestres et marin. Open Pilot se décline en deux plateformes distinctes: CopterControl et OpenPilot Pro. La carte de stabilisation électronique CopterControl embarque des accéléromètres + gyro (3 axes) qui peuvent être complétés de différents capteurs et système de communication via le Flexi-port (I2C / port série). La mise à jour du firmware et la configuration se fait simplement par le biais du mini port USB embarqué. Un quadricoptère autonome en plein vol. La hi-tech est décidément du pain béni pour bien des bricoleurs.

Un étudiant californien atypique l'a démontré en présentant son projet à son université de Berkeley. Patrick Bouffard, un ancien de l'industrie aérospatiale, est retourné sur les bancs d'écoles pour la satisfaction d'en apprendre plus, et on peut dire qu'il y prend du plaisir. On connaissait déjà plusieurs usages du Kinect. Pour l'un de ses projets d'études, ce monsieur à l'esprit sans limite a créé un drôle d'appareil hybride entre un AR Drone et Kinect, basé sur un driver open source. Ce quadrirotor est associé à un autre projet open-source appelé Robot Operating System. Boutique. X-04 Quadricoptere !!!!!! - Forum et actu robotique - Robot-Maker.com. Bonjour à tous!!!!!!

Il y a plusieurs mois, j'ai eu la subite envie de realiser un quadricoptere, si vous ne connaissez pas, c'est un appareil à 4 helices. Pour le moment, j'ai realiser toutes la structure et la partie mecanique de l'appareil, mais voilà, il manque la partie la plus compliqué : l'electronique. Le truc, c'est que j'ai posté plusieurs sujets sur un forum d'electronique ( futura-sciences ), mais personnes n'y repond, donc je suppose que peut etre vous allez m'aider pour la partie electronique. Biensur, avant de vous presenter mon engin, je vais vous dire quelques caracteristiques: 4 moteurs à balais : de 6à9V de 3.2A max qui tourne dans les alentours de 15000tr/min avec une pouser de 1Ncm & le poids et de 66g le moteur. 4Systeme reducteur qui augmenter l'effet poussé de l'appareil ( reducteur + roulement à billes ).
Un Quadricoptere nommé Xtreme. Date : 10/06/2008 Après un peu de robotique, je me met maintenant au modelisme. Cela fait des projets plus simple (J'ai dis plus simple, pas simple), et où l'ont voit rapidement les résultats des efforts déployés. Quadricoptere ?????? - Forums aéromodélisme et modélisme - Aeromodelisme.orG > Communiquer > Forums de l'aéromodélisme et modélisme. [En cours]X-04 Quadricoptere[Thor05] - Forum Projets électroniques. Un quadricoptere éléctrique open source.