
Gyroscopes, Accelerometers and the Complementary Filter. How Balance Works:- In teaching a robot how to stand straight and not fall over, we need to understand how balance really works.
Balance is something we take for granted in our daily lives, most of us are actually pretty good at it, until we have had a little too much to drink. Here is how I think balance (writ easy) works: 1. We need a sensor that tells us how ‘upright’ we are standing. MPU6050 from Invensense. 6 DOF sensor that can be used to determine attitude 2. If the COG lies outside the baseline, the body will tip over. Open source IMU and AHRS algorithms. X-io Technologies. Filtering the accelerometer/gyroscope output of a MPU6050 6DOF sensor. Find out more about davidegironi. AVR Atmega MPU6050 gyroscope and accellerometer lib + processing. Updated to version 03 The MPU-6050 has an embedded 3-axis MEMS gyroscope, a 3-axis MEMS accelerometer, and a Digital Motion Processor (DMP) hardware accelerator engine with an auxiliary I2C port that interfaces to 3rd party digital sensors such as magnetometers.
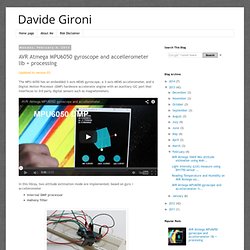
In this libray, two attitude extimation mode are implemented, based on gyro + accellerometer internal DMP processormahony filter Gyro calibration is suggested to get more accurate parameters. Setup parameters are stored in file mpu6050.h A processing.org sketch is provided to display attitude estimation. This library is developed on Eclipse, built with avr-gcc on Atmega168 @ 16MHz. In addition to the processing sketch, Omid Abolghasemi provides this Matlab code to visualize quaternion data: Changelog 03: init fix to prevent random incorrect +/- 16g scaling register setup at startup (fix by Len Spyker 02: attitude estimation refactored to fit standards01: first release Code Notes.
AVR Atmega MPU6050 gyroscope and accellerometer attitude estimation + processing. Mpu6050. Yaw angle estimation of vehicle using IMU. Autopilot: Do it yourself UAV. The latest software release was in 2.5 in March 2003.
There have been numerous changes since then, to the hardware, the onboard software and the simulator. You can still download the 2.5 release and the earlier releases, but it is better to work with the CVS head. You can browse the CVS trees online. The ones of most interest are: sim: An accurate, aerodynamic helicopter simulator for Linux. sim/src/imu-filter: The actual flight controller that runs on the iPAQ. onboard/rev2: The current code that runs on the custom realtime control board. downlink: Tools for manipulating the telemetry data. htdocs: This website. Head rotation: Gyro + Accelerometer. Measure rotation of z axis. Measure rotation of z axis. Chia sẻ - Đọc dữ liệu từ cảm biến MPU6050 dùng bộ lọc Kalman (code for PIC) Chia sẻ - Đọc dữ liệu từ cảm biến MPU6050 dùng bộ lọc Kalman (code for PIC) Kalman filter. The Kalman filter keeps track of the estimated state of the system and the variance or uncertainty of the estimate.
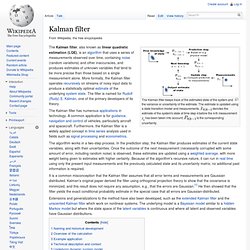
The estimate is updated using a state transition model and measurements. MPU-6050: DMP Data from i2cdevlib. Projects. FreeIMU is an ongoing research project which aims to design Open Hardware 9/10 DOM/DOF Inertial Measurement Units as well as easy to use Orientation and Motion Sensing libraries, built on top of the Arduino platform.
Gyroscopes and Accelerometers on a Chip. My last two blog entries discussed demonstrations of gyroscopes and angular momentum conservation at our school’s science fair.

One of the demonstrations I put together takes a look at how really small gyroscopic sensors, such as those in many smart phones, video game remotes or quad-copters provide information about their changing orientations. This information can be used as feedback for self-balancing (e.g. a two-wheeled scooter), navigation or as input to other applications like video games. I didn’t want to sacrifice my smart phone for this experiment. Bằng sáng chế US8548722 - Tilt sensor and method for determining the tilt of a vehicle - Google Bằng sáng chế. This invention relates to a tilt sensor and a method for determining the tilt of a vehicle.

Certain prior art tilt sensors may not adequately address error in tilt measurements from one or more of the following factors: acceleration associated with centripetal force, acceleration in the direction of travel, or vertical acceleration associated with climbing or descending sloped terrain. For example, some prior art tilt sensors may determine erroneous tilt angles for vehicles because transient centripetal force (e.g., turning) and acceleration in the direction of travel (e.g., starting or stopping) skew accelerometer measurements that are used to estimate the tilt angle.
Accordingly, there is a need for a sensor or sensing method for determining the tilt of a vehicle to compensate for the above factors to achieve accurate and reliable tilt estimates. Tilt Sensing Using Linear Accelerometers by: Kimberly Tuck. Cảm biến Gyro. Thông tin công nghệ. Cảm biến. Điện tử Việt Nam. Gyroscope - Technology MEMS Gyroscopes. Overview Our technology includes five core elements: our patented InvenSense-Fabrication process, our advanced MEMS motion sensor designs, our mixed-signal circuitry for sensor signal processing, our MotionFusion™ and calibration firmware, and our MotionApps™ software consisting of drivers and APIs for applications development on all major consumer electronics operating systems.
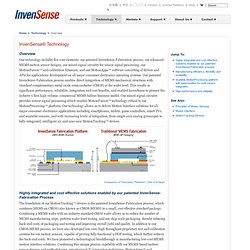
Our patented InvenSense-Fabrication process enables direct integration of MEMS mechanical structures with standard complementary metal oxide semiconductor (CMOS) at the wafer level. This results in significant performance, reliability, integration and cost benefits, and enabled InvenSense to pioneer the industry’s first high-volume, commercial MEMS fabless business model.
Our mixed-signal circuitry provides sensor signal processing which enables MotionFusion™ technology critical to our MotionProcessing™ platform. Manufacturing efficiency, flexibility and scalability High performance and reliability. I2C Device Library. Triple axis acceleroemter with PICAXE – HUSSTECH. LIS302DL by ST Acceleroemters were once very expensive peicies of eqipment, not the case anymore.

There are now dozens of small, cheap, simple acceleroemter chips out there for the general publlic. This turnaround was no doubt facillitated by the prevelenace of acceleroemters in so many of todays’ consumer electroincs. For example in the iphone an acceleromter is used to sense it’s orentation so that it can rotate the screen (actually a very simple implemtnation), and in the Nintendo Wii. FAQ: What's the difference between a gyro and an accelerometer? Do I need both? [Marc Ramsey gave a fantastically clear and concise answer to a question that's asked here every week, so I'm going to reprint it here with some slight edits as a FAQ that we can link to from the front page.]

Q: What's the difference between a gyro and an accelerometer? Do I need both? An accelerometer measures acceleration. A 3-axis accelerometer will tell you the orientation of a stationary platform relative to earth's surface, once that platform starts moving, however, things get more complicated. If the platform is in free-fall, it will show zero acceleration.
A gyro measures rate of rotation around a particular axis. Using the Accelerometer – HUSSTECH. So we can connect the test vehicle and its accelerometer to the PC, now to do something with the data. Accelerometers are devices for measuring the strength of the Earth’s gravitational field in different axes, which means that with some arithmetic you can extract the orientation on the accelerometer and whatever it is attached to. Ever wondered how an iPhone knows when it is turned on its side, well it uses an accelerometer to sense its orientation. Www.analog.com/static/imported-files/application_notes/AN-1057.pdf. Www.analog.com/static/imported-files/application_notes/AN-1057.pdf. Geek Mom Projects. In March, I posted on experimenting with the MPU-6050 IMU chip (mounted in a GY-521 breakout board). It seems that many people are using the MPU-6050, and I wanted to follow up with some more information, because there are better ways to access and process the combined sensor data than were demonstrated in that post.
The previous experiment compared the raw data from the 3-axis accelerometer and 3-axis gyroscope sensors to the results when the raw data are combined via a complementary filter. For the comparison, I had adapted a program from the Arduino Playground Wiki on MPU-6050 to pull the raw accelerometer and gyroscope data from the MPU-6050, The program calculated pitch, roll and yaw (rotation about the X, Y and Z axes, respectively, also knows as Euler Angles).
MPU-6050: DMP Data from i2cdevlib. Www.analog.com/static/imported-files/application_notes/AN-1057.pdf. Www.analog.com/static/imported-files/application_notes/AN-1057.pdf.